Iterative Bounding Box Annotation for Object Detection
Bishwo Adhikari,
Heikki Juhani Huttunen
Auto-TLDR; Semi-Automatic Bounding Box Annotation for Object Detection in Digital Images
Similar papers
A Modified Single-Shot Multibox Detector for Beyond Real-Time Object Detection
Georgios Orfanidis, Konstantinos Ioannidis, Stefanos Vrochidis, Anastasios Tefas, Ioannis Kompatsiaris
Auto-TLDR; Single Shot Detector in Resource-Restricted Systems with Lighter SSD Variations
Abstract Slides Poster Similar
SyNet: An Ensemble Network for Object Detection in UAV Images

Auto-TLDR; SyNet: Combining Multi-Stage and Single-Stage Object Detection for Aerial Images
Incrementally Zero-Shot Detection by an Extreme Value Analyzer
Sixiao Zheng, Yanwei Fu, Yanxi Hou
Auto-TLDR; IZSD-EVer: Incremental Zero-Shot Detection for Incremental Learning
Detecting Objects with High Object Region Percentage
Fen Fang, Qianli Xu, Liyuan Li, Ying Gu, Joo-Hwee Lim

Auto-TLDR; Faster R-CNN for High-ORP Object Detection
Abstract Slides Poster Similar
Detective: An Attentive Recurrent Model for Sparse Object Detection
Amine Kechaou, Manuel Martinez, Monica Haurilet, Rainer Stiefelhagen

Auto-TLDR; Detective: An attentive object detector that identifies objects in images in a sequential manner
Abstract Slides Poster Similar
Hierarchical Head Design for Object Detectors
Shivang Agarwal, Frederic Jurie
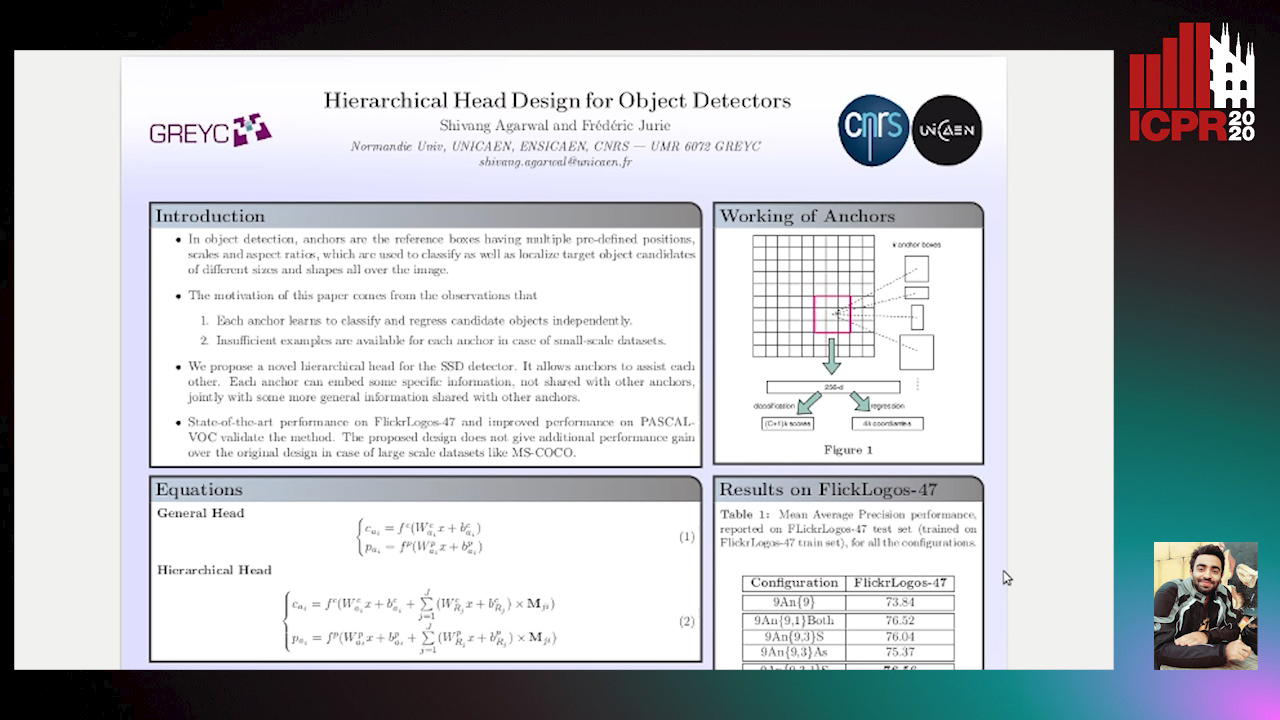
Auto-TLDR; Hierarchical Anchor for SSD Detector
Abstract Slides Poster Similar
Tiny Object Detection in Aerial Images
Jinwang Wang, Wen Yang, Haowen Guo, Ruixiang Zhang, Gui-Song Xia
Auto-TLDR; Tiny Object Detection in Aerial Images Using Multiple Center Points Based Learning Network
Construction Worker Hardhat-Wearing Detection Based on an Improved BiFPN
Chenyang Zhang, Zhiqiang Tian, Jingyi Song, Yaoyue Zheng, Bo Xu

Auto-TLDR; A One-Stage Object Detection Method for Hardhat-Wearing in Construction Site
Abstract Slides Poster Similar
FeatureNMS: Non-Maximum Suppression by Learning Feature Embeddings

Auto-TLDR; FeatureNMS: Non-Maximum Suppression for Multiple Object Detection
Abstract Slides Poster Similar
Object Detection in the DCT Domain: Is Luminance the Solution?
Benjamin Deguerre, Clement Chatelain, Gilles Gasso

Auto-TLDR; Jpeg Deep: Object Detection Using Compressed JPEG Images
Abstract Slides Poster Similar
TGCRBNW: A Dataset for Runner Bib Number Detection (and Recognition) in the Wild
Pablo Hernández-Carrascosa, Adrian Penate-Sanchez, Javier Lorenzo, David Freire Obregón, Modesto Castrillon
Auto-TLDR; Racing Bib Number Detection and Recognition in the Wild Using Faster R-CNN
Abstract Slides Poster Similar
The DeepScoresV2 Dataset and Benchmark for Music Object Detection
Lukas Tuggener, Yvan Putra Satyawan, Alexander Pacha, Jürgen Schmidhuber, Thilo Stadelmann
Auto-TLDR; DeepScoresV2: an extended version of the DeepScores dataset for optical music recognition
Abstract Slides Poster Similar
EAGLE: Large-Scale Vehicle Detection Dataset in Real-World Scenarios Using Aerial Imagery
Seyed Majid Azimi, Reza Bahmanyar, Corentin Henry, Kurz Franz

Auto-TLDR; EAGLE: A Large-Scale Dataset for Multi-class Vehicle Detection with Object Orientation Information in Airborne Imagery
Multi-View Object Detection Using Epipolar Constraints within Cluttered X-Ray Security Imagery
Brian Kostadinov Shalon Isaac-Medina, Chris G. Willcocks, Toby Breckon

Auto-TLDR; Exploiting Epipolar Constraints for Multi-View Object Detection in X-ray Security Images
Abstract Slides Poster Similar
Utilising Visual Attention Cues for Vehicle Detection and Tracking
Feiyan Hu, Venkatesh Gurram Munirathnam, Noel E O'Connor, Alan Smeaton, Suzanne Little

Auto-TLDR; Visual Attention for Object Detection and Tracking in Driver-Assistance Systems
Abstract Slides Poster Similar
Ground-truthing Large Human Behavior Monitoring Datasets
Tehreem Qasim, Robert Fisher, Naeem Bhatti
Auto-TLDR; Semi-automated Groundtruthing for Large Video Datasets
Abstract Slides Poster Similar
Hybrid Cascade Point Search Network for High Precision Bar Chart Component Detection
Junyu Luo, Jinpeng Wang, Chin-Yew Lin
Auto-TLDR; Object Detection of Chart Components in Chart Images Using Point-based and Region-Based Object Detection Framework
Abstract Slides Poster Similar
StrongPose: Bottom-up and Strong Keypoint Heat Map Based Pose Estimation
Auto-TLDR; StrongPose: A bottom-up box-free approach for human pose estimation and action recognition
Abstract Slides Poster Similar
Yolo+FPN: 2D and 3D Fused Object Detection with an RGB-D Camera

Auto-TLDR; Yolo+FPN: Combining 2D and 3D Object Detection for Real-Time Object Detection
Abstract Slides Poster Similar
Multiple-Step Sampling for Dense Object Detection and Counting
Auto-TLDR; Multiple-Step Sampling for Dense Objects Detection
Abstract Slides Poster Similar
Forground-Guided Vehicle Perception Framework
Kun Tian, Tong Zhou, Shiming Xiang, Chunhong Pan

Auto-TLDR; A foreground segmentation branch for vehicle detection
Abstract Slides Poster Similar
CASNet: Common Attribute Support Network for Image Instance and Panoptic Segmentation
Xiaolong Liu, Yuqing Hou, Anbang Yao, Yurong Chen, Keqiang Li

Auto-TLDR; Common Attribute Support Network for instance segmentation and panoptic segmentation
Abstract Slides Poster Similar
Effective Deployment of CNNs for 3DoF Pose Estimation and Grasping in Industrial Settings
Daniele De Gregorio, Riccardo Zanella, Gianluca Palli, Luigi Di Stefano

Auto-TLDR; Automated Deep Learning for Robotic Grasping Applications
Abstract Slides Poster Similar
CDeC-Net: Composite Deformable Cascade Network for Table Detection in Document Images
Madhav Agarwal, Ajoy Mondal, C. V. Jawahar
Auto-TLDR; CDeC-Net: An End-to-End Trainable Deep Network for Detecting Tables in Document Images
Vision-Based Layout Detection from Scientific Literature Using Recurrent Convolutional Neural Networks
Auto-TLDR; Transfer Learning for Scientific Literature Layout Detection Using Convolutional Neural Networks
Abstract Slides Poster Similar
IPT: A Dataset for Identity Preserved Tracking in Closed Domains
Thomas Heitzinger, Martin Kampel

Auto-TLDR; Identity Preserved Tracking Using Depth Data for Privacy and Privacy
Abstract Slides Poster Similar
CenterRepp: Predict Central Representative Point Set's Distribution for Detection
Yulin He, Limeng Zhang, Wei Chen, Xin Luo, Chen Li, Xiaogang Jia
Auto-TLDR; CRPDet: CenterRepp Detector for Object Detection
Abstract Slides Poster Similar
One-Stage Multi-Task Detector for 3D Cardiac MR Imaging
Weizeng Lu, Xi Jia, Wei Chen, Nicolò Savioli, Antonio De Marvao, Linlin Shen, Declan O'Regan, Jinming Duan
Auto-TLDR; Multi-task Learning for Real-Time, simultaneous landmark location and bounding box detection in 3D space
Abstract Slides Poster Similar
MagnifierNet: Learning Efficient Small-Scale Pedestrian Detector towards Multiple Dense Regions
Qi Cheng, Mingqin Chen, Yingjie Wu, Fei Chen, Shiping Lin

Auto-TLDR; MagnifierNet: A Simple but Effective Small-Scale Pedestrian Detection Towards Multiple Dense Regions
Abstract Slides Poster Similar
SynDHN: Multi-Object Fish Tracker Trained on Synthetic Underwater Videos
Mygel Andrei Martija, Prospero Naval

Auto-TLDR; Underwater Multi-Object Tracking in the Wild with Deep Hungarian Network
Abstract Slides Poster Similar
Object Detection Using Dual Graph Network
Shengjia Chen, Zhixin Li, Feicheng Huang, Canlong Zhang, Huifang Ma
Auto-TLDR; A Graph Convolutional Network for Object Detection with Key Relation Information
Point In: Counting Trees with Weakly Supervised Segmentation Network
Pinmo Tong, Shuhui Bu, Pengcheng Han

Auto-TLDR; Weakly Tree counting using Deep Segmentation Network with Localization and Mask Prediction
Abstract Slides Poster Similar
Small Object Detection Leveraging on Simultaneous Super-Resolution
Hong Ji, Zhi Gao, Xiaodong Liu, Tiancan Mei

Auto-TLDR; Super-Resolution via Generative Adversarial Network for Small Object Detection
Object Detection Model Based on Scene-Level Region Proposal Self-Attention
Yu Quan, Zhixin Li, Canlong Zhang, Huifang Ma
Auto-TLDR; Exploiting Semantic Informations for Object Detection
Abstract Slides Poster Similar
ScarfNet: Multi-Scale Features with Deeply Fused and Redistributed Semantics for Enhanced Object Detection
Jin Hyeok Yoo, Dongsuk Kum, Jun Won Choi
Auto-TLDR; Semantic Fusion of Multi-scale Feature Maps for Object Detection
Abstract Slides Poster Similar
Object Detection on Monocular Images with Two-Dimensional Canonical Correlation Analysis

Auto-TLDR; Multi-Task Object Detection from Monocular Images Using Multimodal RGB and Depth Data
Abstract Slides Poster Similar
Image-Based Table Cell Detection: A New Dataset and an Improved Detection Method
Dafeng Wei, Hongtao Lu, Yi Zhou, Kai Chen
Auto-TLDR; TableCell: A Semi-supervised Dataset for Table-wise Detection and Recognition
Abstract Slides Poster Similar
HPERL: 3D Human Pose Estimastion from RGB and LiDAR
Michael Fürst, Shriya T.P. Gupta, René Schuster, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; 3D Human Pose Estimation Using RGB and LiDAR Using Weakly-Supervised Approach
Abstract Slides Poster Similar
Learning with Delayed Feedback
Pranavan Theivendiram, Terence Sim
Auto-TLDR; Unsupervised Machine Learning with Delayed Feedback
Abstract Slides Poster Similar
MAGNet: Multi-Region Attention-Assisted Grounding of Natural Language Queries at Phrase Level
Amar Shrestha, Krittaphat Pugdeethosapol, Haowen Fang, Qinru Qiu
Auto-TLDR; MAGNet: A Multi-Region Attention-Aware Grounding Network for Free-form Textual Queries
Abstract Slides Poster Similar
Which Airline Is This? Airline Logo Detection in Real-World Weather Conditions
Christian Wilms, Rafael Heid, Mohammad Araf Sadeghi, Andreas Ribbrock, Simone Frintrop

Auto-TLDR; Airlines logo detection on airplane tails using data augmentation
Abstract Slides Poster Similar
Early Wildfire Smoke Detection in Videos
Taanya Gupta, Hengyue Liu, Bir Bhanu

Auto-TLDR; Semi-supervised Spatio-Temporal Video Object Segmentation for Automatic Detection of Smoke in Videos during Forest Fire
Scene Text Detection with Selected Anchors
Anna Zhu, Hang Du, Shengwu Xiong
Auto-TLDR; AS-RPN: Anchor Selection-based Region Proposal Network for Scene Text Detection
Abstract Slides Poster Similar
Context for Object Detection Via Lightweight Global and Mid-Level Representations
Mesut Erhan Unal, Adriana Kovashka
Auto-TLDR; Context-Based Object Detection with Semantic Similarity
Abstract Slides Poster Similar
DualBox: Generating BBox Pair with Strong Correspondence Via Occlusion Pattern Clustering and Proposal Refinement
Zheng Ge, Chuyu Hu, Xin Huang, Baiqiao Qiu, Osamu Yoshie
Auto-TLDR; R2NMS: Combining Full and Visible Body Bounding Box for Dense Pedestrian Detection
Abstract Slides Poster Similar
Vehicle Lane Merge Visual Benchmark

Auto-TLDR; A Benchmark for Automated Cooperative Maneuvering Using Multi-view Video Streams and Ground Truth Vehicle Description
Abstract Slides Poster Similar
An Integrated Approach of Deep Learning and Symbolic Analysis for Digital PDF Table Extraction
Mengshi Zhang, Daniel Perelman, Vu Le, Sumit Gulwani
Auto-TLDR; Deep Learning and Symbolic Reasoning for Unstructured PDF Table Extraction
Abstract Slides Poster Similar
Convolutional STN for Weakly Supervised Object Localization
Akhil Meethal, Marco Pedersoli, Soufiane Belharbi, Eric Granger
Auto-TLDR; Spatial Localization for Weakly Supervised Object Localization