EAGLE: Large-Scale Vehicle Detection Dataset in Real-World Scenarios Using Aerial Imagery
Seyed Majid Azimi,
Reza Bahmanyar,
Corentin Henry,
Kurz Franz

Auto-TLDR; EAGLE: A Large-Scale Dataset for Multi-class Vehicle Detection with Object Orientation Information in Airborne Imagery
Similar papers
Tiny Object Detection in Aerial Images
Jinwang Wang, Wen Yang, Haowen Guo, Ruixiang Zhang, Gui-Song Xia
Auto-TLDR; Tiny Object Detection in Aerial Images Using Multiple Center Points Based Learning Network
Cascade Saliency Attention Network for Object Detection in Remote Sensing Images
Dayang Yu, Rong Zhang, Shan Qin
Auto-TLDR; Cascade Saliency Attention Network for Object Detection in Remote Sensing Images
Abstract Slides Poster Similar
SyNet: An Ensemble Network for Object Detection in UAV Images

Auto-TLDR; SyNet: Combining Multi-Stage and Single-Stage Object Detection for Aerial Images
AerialMPTNet: Multi-Pedestrian Tracking in Aerial Imagery Using Temporal and Graphical Features
Maximilian Kraus, Seyed Majid Azimi, Emec Ercelik, Reza Bahmanyar, Peter Reinartz, Alois Knoll

Auto-TLDR; AerialMPTNet: A novel approach for multi-pedestrian tracking in geo-referenced aerial imagery by fusing appearance features
Abstract Slides Poster Similar
Scene Text Detection with Selected Anchors
Anna Zhu, Hang Du, Shengwu Xiong
Auto-TLDR; AS-RPN: Anchor Selection-based Region Proposal Network for Scene Text Detection
Abstract Slides Poster Similar
Detecting Objects with High Object Region Percentage
Fen Fang, Qianli Xu, Liyuan Li, Ying Gu, Joo-Hwee Lim

Auto-TLDR; Faster R-CNN for High-ORP Object Detection
Abstract Slides Poster Similar
The DeepScoresV2 Dataset and Benchmark for Music Object Detection
Lukas Tuggener, Yvan Putra Satyawan, Alexander Pacha, Jürgen Schmidhuber, Thilo Stadelmann
Auto-TLDR; DeepScoresV2: an extended version of the DeepScores dataset for optical music recognition
Abstract Slides Poster Similar
Which Airline Is This? Airline Logo Detection in Real-World Weather Conditions
Christian Wilms, Rafael Heid, Mohammad Araf Sadeghi, Andreas Ribbrock, Simone Frintrop

Auto-TLDR; Airlines logo detection on airplane tails using data augmentation
Abstract Slides Poster Similar
MagnifierNet: Learning Efficient Small-Scale Pedestrian Detector towards Multiple Dense Regions
Qi Cheng, Mingqin Chen, Yingjie Wu, Fei Chen, Shiping Lin

Auto-TLDR; MagnifierNet: A Simple but Effective Small-Scale Pedestrian Detection Towards Multiple Dense Regions
Abstract Slides Poster Similar
Forground-Guided Vehicle Perception Framework
Kun Tian, Tong Zhou, Shiming Xiang, Chunhong Pan

Auto-TLDR; A foreground segmentation branch for vehicle detection
Abstract Slides Poster Similar
DualBox: Generating BBox Pair with Strong Correspondence Via Occlusion Pattern Clustering and Proposal Refinement
Zheng Ge, Chuyu Hu, Xin Huang, Baiqiao Qiu, Osamu Yoshie
Auto-TLDR; R2NMS: Combining Full and Visible Body Bounding Box for Dense Pedestrian Detection
Abstract Slides Poster Similar
End-To-End Deep Learning Methods for Automated Damage Detection in Extreme Events at Various Scales
Yongsheng Bai, Alper Yilmaz, Halil Sezen

Auto-TLDR; Robust Mask R-CNN for Crack Detection in Extreme Events
Abstract Slides Poster Similar
Small Object Detection Leveraging on Simultaneous Super-Resolution
Hong Ji, Zhi Gao, Xiaodong Liu, Tiancan Mei

Auto-TLDR; Super-Resolution via Generative Adversarial Network for Small Object Detection
Automatically Gather Address Specific Dwelling Images Using Google Street View
Auto-TLDR; Automatic Address Specific Dwelling Image Collection Using Google Street View Data
Abstract Slides Poster Similar
CASNet: Common Attribute Support Network for Image Instance and Panoptic Segmentation
Xiaolong Liu, Yuqing Hou, Anbang Yao, Yurong Chen, Keqiang Li

Auto-TLDR; Common Attribute Support Network for instance segmentation and panoptic segmentation
Abstract Slides Poster Similar
StrongPose: Bottom-up and Strong Keypoint Heat Map Based Pose Estimation
Auto-TLDR; StrongPose: A bottom-up box-free approach for human pose estimation and action recognition
Abstract Slides Poster Similar
Multiple-Step Sampling for Dense Object Detection and Counting
Auto-TLDR; Multiple-Step Sampling for Dense Objects Detection
Abstract Slides Poster Similar
Uncertainty Guided Recognition of Tiny Craters on the Moon
Thorsten Wilhelm, Christian Wöhler

Auto-TLDR; Accurately Detecting Tiny Craters in Remote Sensed Images Using Deep Neural Networks
Abstract Slides Poster Similar
Detective: An Attentive Recurrent Model for Sparse Object Detection
Amine Kechaou, Manuel Martinez, Monica Haurilet, Rainer Stiefelhagen

Auto-TLDR; Detective: An attentive object detector that identifies objects in images in a sequential manner
Abstract Slides Poster Similar
Construction Worker Hardhat-Wearing Detection Based on an Improved BiFPN
Chenyang Zhang, Zhiqiang Tian, Jingyi Song, Yaoyue Zheng, Bo Xu

Auto-TLDR; A One-Stage Object Detection Method for Hardhat-Wearing in Construction Site
Abstract Slides Poster Similar
Hierarchical Head Design for Object Detectors
Shivang Agarwal, Frederic Jurie
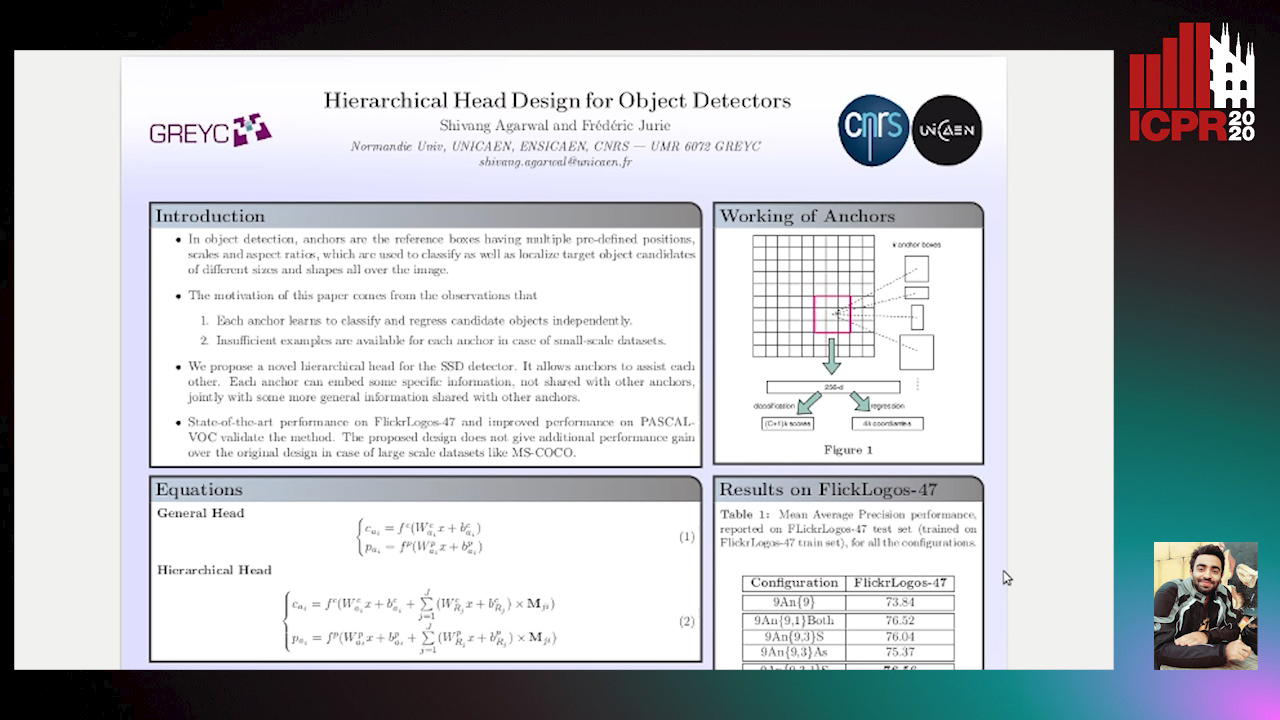
Auto-TLDR; Hierarchical Anchor for SSD Detector
Abstract Slides Poster Similar
Iterative Bounding Box Annotation for Object Detection
Bishwo Adhikari, Heikki Juhani Huttunen
Auto-TLDR; Semi-Automatic Bounding Box Annotation for Object Detection in Digital Images
Abstract Slides Poster Similar
RescueNet: Joint Building Segmentation and Damage Assessment from Satellite Imagery
Auto-TLDR; RescueNet: End-to-End Building Segmentation and Damage Classification for Humanitarian Aid and Disaster Response
Abstract Slides Poster Similar
HPERL: 3D Human Pose Estimastion from RGB and LiDAR
Michael Fürst, Shriya T.P. Gupta, René Schuster, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; 3D Human Pose Estimation Using RGB and LiDAR Using Weakly-Supervised Approach
Abstract Slides Poster Similar
Effective Deployment of CNNs for 3DoF Pose Estimation and Grasping in Industrial Settings
Daniele De Gregorio, Riccardo Zanella, Gianluca Palli, Luigi Di Stefano

Auto-TLDR; Automated Deep Learning for Robotic Grasping Applications
Abstract Slides Poster Similar
ACRM: Attention Cascade R-CNN with Mix-NMS for Metallic Surface Defect Detection
Junting Fang, Xiaoyang Tan, Yuhui Wang

Auto-TLDR; Attention Cascade R-CNN with Mix Non-Maximum Suppression for Robust Metal Defect Detection
Abstract Slides Poster Similar
Early Wildfire Smoke Detection in Videos
Taanya Gupta, Hengyue Liu, Bir Bhanu

Auto-TLDR; Semi-supervised Spatio-Temporal Video Object Segmentation for Automatic Detection of Smoke in Videos during Forest Fire
Hybrid Cascade Point Search Network for High Precision Bar Chart Component Detection
Junyu Luo, Jinpeng Wang, Chin-Yew Lin
Auto-TLDR; Object Detection of Chart Components in Chart Images Using Point-based and Region-Based Object Detection Framework
Abstract Slides Poster Similar
Derivation of Geometrically and Semantically Annotated UAV Datasets at Large Scales from 3D City Models
Sidi Wu, Lukas Liebel, Marco Körner

Auto-TLDR; Large-Scale Dataset of Synthetic UAV Imagery for Geometric and Semantic Annotation
Abstract Slides Poster Similar
A Modified Single-Shot Multibox Detector for Beyond Real-Time Object Detection
Georgios Orfanidis, Konstantinos Ioannidis, Stefanos Vrochidis, Anastasios Tefas, Ioannis Kompatsiaris
Auto-TLDR; Single Shot Detector in Resource-Restricted Systems with Lighter SSD Variations
Abstract Slides Poster Similar
Object Features and Face Detection Performance: Analyses with 3D-Rendered Synthetic Data
Jian Han, Sezer Karaoglu, Hoang-An Le, Theo Gevers
Auto-TLDR; Synthetic Data for Face Detection Using 3DU Face Dataset
Abstract Slides Poster Similar
Small Object Detection by Generative and Discriminative Learning
Yi Gu, Jie Li, Chentao Wu, Weijia Jia, Jianping Chen
Auto-TLDR; Generative and Discriminative Learning for Small Object Detection
Abstract Slides Poster Similar
Bidirectional Matrix Feature Pyramid Network for Object Detection
Auto-TLDR; BMFPN: Bidirectional Matrix Feature Pyramid Network for Object Detection
Abstract Slides Poster Similar
Vehicle Lane Merge Visual Benchmark

Auto-TLDR; A Benchmark for Automated Cooperative Maneuvering Using Multi-view Video Streams and Ground Truth Vehicle Description
Abstract Slides Poster Similar
CenterRepp: Predict Central Representative Point Set's Distribution for Detection
Yulin He, Limeng Zhang, Wei Chen, Xin Luo, Chen Li, Xiaogang Jia
Auto-TLDR; CRPDet: CenterRepp Detector for Object Detection
Abstract Slides Poster Similar
Convolutional STN for Weakly Supervised Object Localization
Akhil Meethal, Marco Pedersoli, Soufiane Belharbi, Eric Granger
Auto-TLDR; Spatial Localization for Weakly Supervised Object Localization
SIMCO: SIMilarity-Based Object COunting
Marco Godi, Christian Joppi, Andrea Giachetti, Marco Cristani
Auto-TLDR; SIMCO: An Unsupervised Multi-class Object Counting Approach on InShape
Abstract Slides Poster Similar
CDeC-Net: Composite Deformable Cascade Network for Table Detection in Document Images
Madhav Agarwal, Ajoy Mondal, C. V. Jawahar
Auto-TLDR; CDeC-Net: An End-to-End Trainable Deep Network for Detecting Tables in Document Images
FeatureNMS: Non-Maximum Suppression by Learning Feature Embeddings

Auto-TLDR; FeatureNMS: Non-Maximum Suppression for Multiple Object Detection
Abstract Slides Poster Similar
A Fine-Grained Dataset and Its Efficient Semantic Segmentation for Unstructured Driving Scenarios
Kai Andreas Metzger, Peter Mortimer, Hans J "Joe" Wuensche

Auto-TLDR; TAS500: A Semantic Segmentation Dataset for Autonomous Driving in Unstructured Environments
Abstract Slides Poster Similar
Object Detection in the DCT Domain: Is Luminance the Solution?
Benjamin Deguerre, Clement Chatelain, Gilles Gasso

Auto-TLDR; Jpeg Deep: Object Detection Using Compressed JPEG Images
Abstract Slides Poster Similar
Story Comparison for Estimating Field of View Overlap in a Video Collection
Thierry Malon, Sylvie Chambon, Alain Crouzil, Vincent Charvillat
Auto-TLDR; Finding Videos with Overlapping Fields of View Using Video Data
Multi-View Object Detection Using Epipolar Constraints within Cluttered X-Ray Security Imagery
Brian Kostadinov Shalon Isaac-Medina, Chris G. Willcocks, Toby Breckon

Auto-TLDR; Exploiting Epipolar Constraints for Multi-View Object Detection in X-ray Security Images
Abstract Slides Poster Similar
Machine-Learned Regularization and Polygonization of Building Segmentation Masks
Stefano Zorzi, Ksenia Bittner, Friedrich Fraundorfer

Auto-TLDR; Automatic Regularization and Polygonization of Building Segmentation masks using Generative Adversarial Network
Abstract Slides Poster Similar
CCA: Exploring the Possibility of Contextual Camouflage Attack on Object Detection
Shengnan Hu, Yang Zhang, Sumit Laha, Ankit Sharma, Hassan Foroosh
Auto-TLDR; Contextual camouflage attack for object detection
Abstract Slides Poster Similar
Triplet-Path Dilated Network for Detection and Segmentation of General Pathological Images
Jiaqi Luo, Zhicheng Zhao, Fei Su, Limei Guo
Auto-TLDR; Triplet-path Network for One-Stage Object Detection and Segmentation in Pathological Images
SFPN: Semantic Feature Pyramid Network for Object Detection
Auto-TLDR; SFPN: Semantic Feature Pyramid Network to Address Information Dilution Issue in FPN
Abstract Slides Poster Similar
Adaptive Remote Sensing Image Attribute Learning for Active Object Detection
Nuo Xu, Chunlei Huo, Chunhong Pan
Auto-TLDR; Adaptive Image Attribute Learning for Active Object Detection