CCA: Exploring the Possibility of Contextual Camouflage Attack on Object Detection
Shengnan Hu,
Yang Zhang,
Sumit Laha,
Ankit Sharma,
Hassan Foroosh
Auto-TLDR; Contextual camouflage attack for object detection
Similar papers
AdvHat: Real-World Adversarial Attack on ArcFace Face ID System
Stepan Komkov, Aleksandr Petiushko
Auto-TLDR; Adversarial Sticker Attack on ArcFace in Shooting Conditions
Abstract Slides Poster Similar
Transferable Adversarial Attacks for Deep Scene Text Detection
Shudeng Wu, Tao Dai, Guanghao Meng, Bin Chen, Jian Lu, Shutao Xia
Auto-TLDR; Robustness of DNN-based STD methods against Adversarial Attacks
SyNet: An Ensemble Network for Object Detection in UAV Images

Auto-TLDR; SyNet: Combining Multi-Stage and Single-Stage Object Detection for Aerial Images
Optimal Transport As a Defense against Adversarial Attacks
Quentin Bouniot, Romaric Audigier, Angélique Loesch

Auto-TLDR; Sinkhorn Adversarial Training with Optimal Transport Theory
Abstract Slides Poster Similar
MFPP: Morphological Fragmental Perturbation Pyramid for Black-Box Model Explanations
Qing Yang, Xia Zhu, Jong-Kae Fwu, Yun Ye, Ganmei You, Yuan Zhu
Auto-TLDR; Morphological Fragmental Perturbation Pyramid for Explainable Deep Neural Network
Abstract Slides Poster Similar
Forground-Guided Vehicle Perception Framework
Kun Tian, Tong Zhou, Shiming Xiang, Chunhong Pan

Auto-TLDR; A foreground segmentation branch for vehicle detection
Abstract Slides Poster Similar
Transformer-Encoder Detector Module: Using Context to Improve Robustness to Adversarial Attacks on Object Detection
Faisal Alamri, Sinan Kalkan, Nicolas Pugeault
Auto-TLDR; Context Module for Robust Object Detection with Transformer-Encoder Detector Module
Abstract Slides Poster Similar
Cost-Effective Adversarial Attacks against Scene Text Recognition
Mingkun Yang, Haitian Zheng, Xiang Bai, Jiebo Luo
Auto-TLDR; Adversarial Attacks on Scene Text Recognition
Abstract Slides Poster Similar
Object Detection on Monocular Images with Two-Dimensional Canonical Correlation Analysis

Auto-TLDR; Multi-Task Object Detection from Monocular Images Using Multimodal RGB and Depth Data
Abstract Slides Poster Similar
F-Mixup: Attack CNNs from Fourier Perspective
Xiu-Chuan Li, Xu-Yao Zhang, Fei Yin, Cheng-Lin Liu
Auto-TLDR; F-Mixup: A novel black-box attack in frequency domain for deep neural networks
Abstract Slides Poster Similar
Adversarially Training for Audio Classifiers
Raymel Alfonso Sallo, Mohammad Esmaeilpour, Patrick Cardinal
Auto-TLDR; Adversarially Training for Robust Neural Networks against Adversarial Attacks
Abstract Slides Poster Similar
Task-based Focal Loss for Adversarially Robust Meta-Learning
Yufan Hou, Lixin Zou, Weidong Liu

Auto-TLDR; Task-based Adversarial Focal Loss for Few-shot Meta-Learner
Abstract Slides Poster Similar
Zoom-CAM: Generating Fine-Grained Pixel Annotations from Image Labels
Xiangwei Shi, Seyran Khademi, Yunqiang Li, Jan Van Gemert
Auto-TLDR; Zoom-CAM for Weakly Supervised Object Localization and Segmentation
Abstract Slides Poster Similar
Adaptive Noise Injection for Training Stochastic Student Networks from Deterministic Teachers
Yi Xiang Marcus Tan, Yuval Elovici, Alexander Binder
Auto-TLDR; Adaptive Stochastic Networks for Adversarial Attacks
Tiny Object Detection in Aerial Images
Jinwang Wang, Wen Yang, Haowen Guo, Ruixiang Zhang, Gui-Song Xia
Auto-TLDR; Tiny Object Detection in Aerial Images Using Multiple Center Points Based Learning Network
Detecting Objects with High Object Region Percentage
Fen Fang, Qianli Xu, Liyuan Li, Ying Gu, Joo-Hwee Lim

Auto-TLDR; Faster R-CNN for High-ORP Object Detection
Abstract Slides Poster Similar
EAGLE: Large-Scale Vehicle Detection Dataset in Real-World Scenarios Using Aerial Imagery
Seyed Majid Azimi, Reza Bahmanyar, Corentin Henry, Kurz Franz

Auto-TLDR; EAGLE: A Large-Scale Dataset for Multi-class Vehicle Detection with Object Orientation Information in Airborne Imagery
Defense Mechanism against Adversarial Attacks Using Density-Based Representation of Images
Yen-Ting Huang, Wen-Hung Liao, Chen-Wei Huang
Auto-TLDR; Adversarial Attacks Reduction Using Input Recharacterization
Abstract Slides Poster Similar
Variational Inference with Latent Space Quantization for Adversarial Resilience
Vinay Kyatham, Deepak Mishra, Prathosh A.P.
Auto-TLDR; A Generalized Defense Mechanism for Adversarial Attacks on Data Manifolds
Abstract Slides Poster Similar
Small Object Detection Leveraging on Simultaneous Super-Resolution
Hong Ji, Zhi Gao, Xiaodong Liu, Tiancan Mei

Auto-TLDR; Super-Resolution via Generative Adversarial Network for Small Object Detection
Bidirectional Matrix Feature Pyramid Network for Object Detection
Auto-TLDR; BMFPN: Bidirectional Matrix Feature Pyramid Network for Object Detection
Abstract Slides Poster Similar
Utilising Visual Attention Cues for Vehicle Detection and Tracking
Feiyan Hu, Venkatesh Gurram Munirathnam, Noel E O'Connor, Alan Smeaton, Suzanne Little

Auto-TLDR; Visual Attention for Object Detection and Tracking in Driver-Assistance Systems
Abstract Slides Poster Similar
FeatureNMS: Non-Maximum Suppression by Learning Feature Embeddings

Auto-TLDR; FeatureNMS: Non-Maximum Suppression for Multiple Object Detection
Abstract Slides Poster Similar
Small Object Detection by Generative and Discriminative Learning
Yi Gu, Jie Li, Chentao Wu, Weijia Jia, Jianping Chen
Auto-TLDR; Generative and Discriminative Learning for Small Object Detection
Abstract Slides Poster Similar
Future Urban Scenes Generation through Vehicles Synthesis
Alessandro Simoni, Luca Bergamini, Andrea Palazzi, Simone Calderara, Rita Cucchiara

Auto-TLDR; Predicting the Future of an Urban Scene with a Novel View Synthesis Paradigm
Abstract Slides Poster Similar
Beyond Cross-Entropy: Learning Highly Separable Feature Distributions for Robust and Accurate Classification
Arslan Ali, Andrea Migliorati, Tiziano Bianchi, Enrico Magli
Auto-TLDR; Gaussian class-conditional simplex loss for adversarial robust multiclass classifiers
Abstract Slides Poster Similar
Foreground-Focused Domain Adaption for Object Detection
Auto-TLDR; Unsupervised Domain Adaptation for Unsupervised Object Detection
Explain2Attack: Text Adversarial Attacks via Cross-Domain Interpretability
Mahmoud Hossam, Le Trung, He Zhao, Dinh Phung
Auto-TLDR; Transfer2Attack: A Black-box Adversarial Attack on Text Classification
Abstract Slides Poster Similar
Multi-View Object Detection Using Epipolar Constraints within Cluttered X-Ray Security Imagery
Brian Kostadinov Shalon Isaac-Medina, Chris G. Willcocks, Toby Breckon

Auto-TLDR; Exploiting Epipolar Constraints for Multi-View Object Detection in X-ray Security Images
Abstract Slides Poster Similar
Effective Deployment of CNNs for 3DoF Pose Estimation and Grasping in Industrial Settings
Daniele De Gregorio, Riccardo Zanella, Gianluca Palli, Luigi Di Stefano

Auto-TLDR; Automated Deep Learning for Robotic Grasping Applications
Abstract Slides Poster Similar
Attack Agnostic Adversarial Defense via Visual Imperceptible Bound
Saheb Chhabra, Akshay Agarwal, Richa Singh, Mayank Vatsa
Auto-TLDR; Robust Adversarial Defense with Visual Imperceptible Bound
Abstract Slides Poster Similar
A Delayed Elastic-Net Approach for Performing Adversarial Attacks
Brais Cancela, Veronica Bolon-Canedo, Amparo Alonso-Betanzos
Auto-TLDR; Robustness of ImageNet Pretrained Models against Adversarial Attacks
Abstract Slides Poster Similar
Multiple-Step Sampling for Dense Object Detection and Counting
Auto-TLDR; Multiple-Step Sampling for Dense Objects Detection
Abstract Slides Poster Similar
Construction Worker Hardhat-Wearing Detection Based on an Improved BiFPN
Chenyang Zhang, Zhiqiang Tian, Jingyi Song, Yaoyue Zheng, Bo Xu

Auto-TLDR; A One-Stage Object Detection Method for Hardhat-Wearing in Construction Site
Abstract Slides Poster Similar
Accuracy-Perturbation Curves for Evaluation of Adversarial Attack and Defence Methods
Auto-TLDR; Accuracy-perturbation Curve for Robustness Evaluation of Adversarial Examples
Abstract Slides Poster Similar
A Modified Single-Shot Multibox Detector for Beyond Real-Time Object Detection
Georgios Orfanidis, Konstantinos Ioannidis, Stefanos Vrochidis, Anastasios Tefas, Ioannis Kompatsiaris
Auto-TLDR; Single Shot Detector in Resource-Restricted Systems with Lighter SSD Variations
Abstract Slides Poster Similar
Towards Explaining Adversarial Examples Phenomenon in Artificial Neural Networks
Ramin Barati, Reza Safabakhsh, Mohammad Rahmati
Auto-TLDR; Convolutional Neural Networks and Adversarial Training from the Perspective of convergence
Abstract Slides Poster Similar
Detective: An Attentive Recurrent Model for Sparse Object Detection
Amine Kechaou, Manuel Martinez, Monica Haurilet, Rainer Stiefelhagen

Auto-TLDR; Detective: An attentive object detector that identifies objects in images in a sequential manner
Abstract Slides Poster Similar
Attack-Agnostic Adversarial Detection on Medical Data Using Explainable Machine Learning
Matthew Watson, Noura Al Moubayed
Auto-TLDR; Explainability-based Detection of Adversarial Samples on EHR and Chest X-Ray Data
Abstract Slides Poster Similar
SFPN: Semantic Feature Pyramid Network for Object Detection
Auto-TLDR; SFPN: Semantic Feature Pyramid Network to Address Information Dilution Issue in FPN
Abstract Slides Poster Similar
Iterative Bounding Box Annotation for Object Detection
Bishwo Adhikari, Heikki Juhani Huttunen
Auto-TLDR; Semi-Automatic Bounding Box Annotation for Object Detection in Digital Images
Abstract Slides Poster Similar
Triplet-Path Dilated Network for Detection and Segmentation of General Pathological Images
Jiaqi Luo, Zhicheng Zhao, Fei Su, Limei Guo
Auto-TLDR; Triplet-path Network for One-Stage Object Detection and Segmentation in Pathological Images
Hierarchical Head Design for Object Detectors
Shivang Agarwal, Frederic Jurie
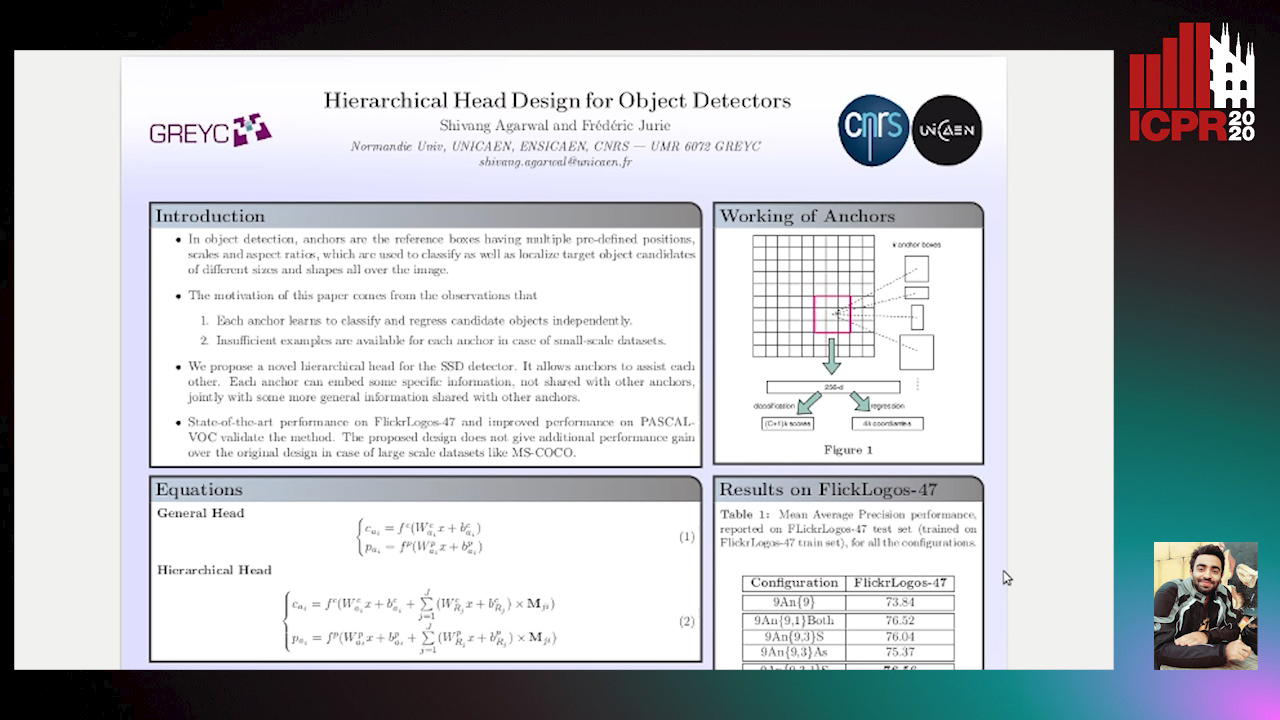
Auto-TLDR; Hierarchical Anchor for SSD Detector
Abstract Slides Poster Similar
Compression of YOLOv3 Via Block-Wise and Channel-Wise Pruning for Real-Time and Complicated Autonomous Driving Environment Sensing Applications
Jiaqi Li, Yanan Zhao, Li Gao, Feng Cui
Auto-TLDR; Pruning YOLOv3 with Batch Normalization for Autonomous Driving
Abstract Slides Poster Similar
How Does DCNN Make Decisions?
Yi Lin, Namin Wang, Xiaoqing Ma, Ziwei Li, Gang Bai
Auto-TLDR; Exploring Deep Convolutional Neural Network's Decision-Making Interpretability
Abstract Slides Poster Similar
Understanding Integrated Gradients with SmoothTaylor for Deep Neural Network Attribution
Gary Shing Wee Goh, Sebastian Lapuschkin, Leander Weber, Wojciech Samek, Alexander Binder
Auto-TLDR; SmoothGrad: bridging Integrated Gradients and SmoothGrad from the Taylor's theorem perspective
Killing Four Birds with One Gaussian Process: The Relation between Different Test-Time Attacks
Kathrin Grosse, Michael Thomas Smith, Michael Backes
Auto-TLDR; Security of Gaussian Process Classifiers against Attack Algorithms
Abstract Slides Poster Similar
MagnifierNet: Learning Efficient Small-Scale Pedestrian Detector towards Multiple Dense Regions
Qi Cheng, Mingqin Chen, Yingjie Wu, Fei Chen, Shiping Lin

Auto-TLDR; MagnifierNet: A Simple but Effective Small-Scale Pedestrian Detection Towards Multiple Dense Regions
Abstract Slides Poster Similar