Compression of YOLOv3 Via Block-Wise and Channel-Wise Pruning for Real-Time and Complicated Autonomous Driving Environment Sensing Applications
Jiaqi Li,
Yanan Zhao,
Li Gao,
Feng Cui
Auto-TLDR; Pruning YOLOv3 with Batch Normalization for Autonomous Driving
Similar papers
Slimming ResNet by Slimming Shortcut
Donggyu Joo, Doyeon Kim, Junmo Kim
Auto-TLDR; SSPruning: Slimming Shortcut Pruning on ResNet Based Networks
Abstract Slides Poster Similar
Learning to Prune in Training via Dynamic Channel Propagation
Shibo Shen, Rongpeng Li, Zhifeng Zhao, Honggang Zhang, Yugeng Zhou
Auto-TLDR; Dynamic Channel Propagation for Neural Network Pruning
Abstract Slides Poster Similar
HFP: Hardware-Aware Filter Pruning for Deep Convolutional Neural Networks Acceleration
Fang Yu, Chuanqi Han, Pengcheng Wang, Ruoran Huang, Xi Huang, Li Cui
Auto-TLDR; Hardware-Aware Filter Pruning for Convolutional Neural Networks
Abstract Slides Poster Similar
Progressive Gradient Pruning for Classification, Detection and Domain Adaptation
Le Thanh Nguyen-Meidine, Eric Granger, Marco Pedersoli, Madhu Kiran, Louis-Antoine Blais-Morin
Auto-TLDR; Progressive Gradient Pruning for Iterative Filter Pruning of Convolutional Neural Networks
Abstract Slides Poster Similar
Softer Pruning, Incremental Regularization
Linhang Cai, Zhulin An, Yongjun Xu
Auto-TLDR; Asymptotic SofteR Filter Pruning for Deep Neural Network Pruning
Abstract Slides Poster Similar
Filter Pruning Using Hierarchical Group Sparse Regularization for Deep Convolutional Neural Networks
Auto-TLDR; Hierarchical Group Sparse Regularization for Sparse Convolutional Neural Networks
Abstract Slides Poster Similar
A Modified Single-Shot Multibox Detector for Beyond Real-Time Object Detection
Georgios Orfanidis, Konstantinos Ioannidis, Stefanos Vrochidis, Anastasios Tefas, Ioannis Kompatsiaris
Auto-TLDR; Single Shot Detector in Resource-Restricted Systems with Lighter SSD Variations
Abstract Slides Poster Similar
Forground-Guided Vehicle Perception Framework
Kun Tian, Tong Zhou, Shiming Xiang, Chunhong Pan

Auto-TLDR; A foreground segmentation branch for vehicle detection
Abstract Slides Poster Similar
NAS-EOD: An End-To-End Neural Architecture Search Method for Efficient Object Detection
Huigang Zhang, Liuan Wang, Jun Sun, Li Sun, Hiromichi Kobashi, Nobutaka Imamura
Auto-TLDR; NAS-EOD: Neural Architecture Search for Object Detection on Edge Devices
Neural Compression and Filtering for Edge-assisted Real-time Object Detection in Challenged Networks
Yoshitomo Matsubara, Marco Levorato
Auto-TLDR; Deep Neural Networks for Remote Object Detection Using Edge Computing
Abstract Slides Poster Similar
A Discriminant Information Approach to Deep Neural Network Pruning
Auto-TLDR; Channel Pruning Using Discriminant Information and Reinforcement Learning
Abstract Slides Poster Similar
A Fast and Accurate Object Detector for Handwritten Digit String Recognition
Jun Guo, Wenjing Wei, Yifeng Ma, Cong Peng
Auto-TLDR; ChipNet: An anchor-free object detector for handwritten digit string recognition
Abstract Slides Poster Similar
Object Detection in the DCT Domain: Is Luminance the Solution?
Benjamin Deguerre, Clement Chatelain, Gilles Gasso

Auto-TLDR; Jpeg Deep: Object Detection Using Compressed JPEG Images
Abstract Slides Poster Similar
Towards Low-Bit Quantization of Deep Neural Networks with Limited Data
Yong Yuan, Chen Chen, Xiyuan Hu, Silong Peng
Auto-TLDR; Low-Precision Quantization of Deep Neural Networks with Limited Data
Abstract Slides Poster Similar
Yolo+FPN: 2D and 3D Fused Object Detection with an RGB-D Camera

Auto-TLDR; Yolo+FPN: Combining 2D and 3D Object Detection for Real-Time Object Detection
Abstract Slides Poster Similar
FeatureNMS: Non-Maximum Suppression by Learning Feature Embeddings

Auto-TLDR; FeatureNMS: Non-Maximum Suppression for Multiple Object Detection
Abstract Slides Poster Similar
On the Information of Feature Maps and Pruning of Deep Neural Networks
Mohammadreza Soltani, Suya Wu, Jie Ding, Robert Ravier, Vahid Tarokh
Auto-TLDR; Compressing Deep Neural Models Using Mutual Information
Abstract Slides Poster Similar
Small Object Detection by Generative and Discriminative Learning
Yi Gu, Jie Li, Chentao Wu, Weijia Jia, Jianping Chen
Auto-TLDR; Generative and Discriminative Learning for Small Object Detection
Abstract Slides Poster Similar
Exploiting Non-Linear Redundancy for Neural Model Compression
Muhammad Ahmed Shah, Raphael Olivier, Bhiksha Raj
Auto-TLDR; Compressing Deep Neural Networks with Linear Dependency
Abstract Slides Poster Similar
Construction Worker Hardhat-Wearing Detection Based on an Improved BiFPN
Chenyang Zhang, Zhiqiang Tian, Jingyi Song, Yaoyue Zheng, Bo Xu

Auto-TLDR; A One-Stage Object Detection Method for Hardhat-Wearing in Construction Site
Abstract Slides Poster Similar
SyNet: An Ensemble Network for Object Detection in UAV Images

Auto-TLDR; SyNet: Combining Multi-Stage and Single-Stage Object Detection for Aerial Images
Dynamic Multi-Path Neural Network
Yingcheng Su, Yichao Wu, Ken Chen, Ding Liang, Xiaolin Hu

Auto-TLDR; Dynamic Multi-path Neural Network
Activation Density Driven Efficient Pruning in Training
Timothy Foldy-Porto, Yeshwanth Venkatesha, Priyadarshini Panda
Auto-TLDR; Real-Time Neural Network Pruning with Compressed Networks
Abstract Slides Poster Similar
One-Stage Multi-Task Detector for 3D Cardiac MR Imaging
Weizeng Lu, Xi Jia, Wei Chen, Nicolò Savioli, Antonio De Marvao, Linlin Shen, Declan O'Regan, Jinming Duan
Auto-TLDR; Multi-task Learning for Real-Time, simultaneous landmark location and bounding box detection in 3D space
Abstract Slides Poster Similar
Tiny Object Detection in Aerial Images
Jinwang Wang, Wen Yang, Haowen Guo, Ruixiang Zhang, Gui-Song Xia
Auto-TLDR; Tiny Object Detection in Aerial Images Using Multiple Center Points Based Learning Network
Neuron-Based Network Pruning Based on Majority Voting
Ali Alqahtani, Xianghua Xie, Ehab Essa, Mark W. Jones
Auto-TLDR; Large-Scale Neural Network Pruning using Majority Voting
Abstract Slides Poster Similar
Efficient-Receptive Field Block with Group Spatial Attention Mechanism for Object Detection
Jiacheng Zhang, Zhicheng Zhao, Fei Su
Auto-TLDR; E-RFB: Efficient-Receptive Field Block for Deep Neural Network for Object Detection
Abstract Slides Poster Similar
Learning Sparse Deep Neural Networks Using Efficient Structured Projections on Convex Constraints for Green AI
Michel Barlaud, Frederic Guyard

Auto-TLDR; Constrained Deep Neural Network with Constrained Splitting Projection
Abstract Slides Poster Similar
FastSal: A Computationally Efficient Network for Visual Saliency Prediction
Auto-TLDR; MobileNetV2: A Convolutional Neural Network for Saliency Prediction
Abstract Slides Poster Similar
MagnifierNet: Learning Efficient Small-Scale Pedestrian Detector towards Multiple Dense Regions
Qi Cheng, Mingqin Chen, Yingjie Wu, Fei Chen, Shiping Lin

Auto-TLDR; MagnifierNet: A Simple but Effective Small-Scale Pedestrian Detection Towards Multiple Dense Regions
Abstract Slides Poster Similar
Channel Planting for Deep Neural Networks Using Knowledge Distillation
Kakeru Mitsuno, Yuichiro Nomura, Takio Kurita
Auto-TLDR; Incremental Training for Deep Neural Networks with Knowledge Distillation
Abstract Slides Poster Similar
WeightAlign: Normalizing Activations by Weight Alignment
Xiangwei Shi, Yunqiang Li, Xin Liu, Jan Van Gemert
Auto-TLDR; WeightAlign: Normalization of Activations without Sample Statistics
Abstract Slides Poster Similar
VPU Specific CNNs through Neural Architecture Search
Ciarán Donegan, Hamza Yous, Saksham Sinha, Jonathan Byrne
Auto-TLDR; Efficient Convolutional Neural Networks for Edge Devices using Neural Architecture Search
Abstract Slides Poster Similar
PointDrop: Improving Object Detection from Sparse Point Clouds Via Adversarial Data Augmentation
Wenxin Ma, Jian Chen, Qing Du, Wei Jia

Auto-TLDR; PointDrop: Improving Robust 3D Object Detection to Sparse Point Clouds
Abstract Slides Poster Similar
Deep Real-Time Hand Detection Using CFPN on Embedded Systems
Pirdiansyah Hendri, Jun-Wei Hsieh, Ping Yang Chen
Auto-TLDR; Concatenated Feature Pyramid Network for Small Hand Detection on Embedded Devices
Abstract Slides Poster Similar
Dynamic Low-Light Image Enhancement for Object Detection Via End-To-End Training
Haifeng Guo, Yirui Wu, Tong Lu
Auto-TLDR; Object Detection using Low-Light Image Enhancement for End-to-End Training
Abstract Slides Poster Similar
Utilising Visual Attention Cues for Vehicle Detection and Tracking
Feiyan Hu, Venkatesh Gurram Munirathnam, Noel E O'Connor, Alan Smeaton, Suzanne Little

Auto-TLDR; Visual Attention for Object Detection and Tracking in Driver-Assistance Systems
Abstract Slides Poster Similar
Multiple-Step Sampling for Dense Object Detection and Counting
Auto-TLDR; Multiple-Step Sampling for Dense Objects Detection
Abstract Slides Poster Similar
MINT: Deep Network Compression Via Mutual Information-Based Neuron Trimming
Madan Ravi Ganesh, Jason Corso, Salimeh Yasaei Sekeh
Auto-TLDR; Mutual Information-based Neuron Trimming for Deep Compression via Pruning
Abstract Slides Poster Similar
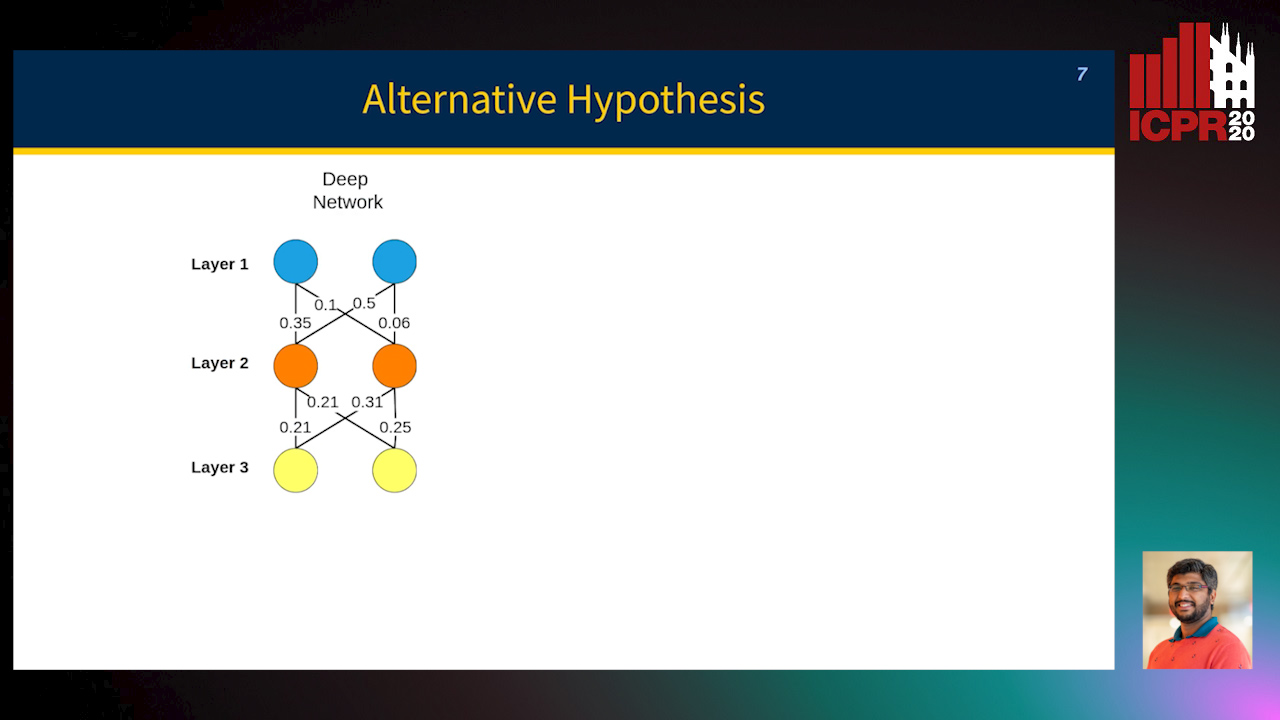
How Does DCNN Make Decisions?
Yi Lin, Namin Wang, Xiaoqing Ma, Ziwei Li, Gang Bai
Auto-TLDR; Exploring Deep Convolutional Neural Network's Decision-Making Interpretability
Abstract Slides Poster Similar
Speeding-Up Pruning for Artificial Neural Networks: Introducing Accelerated Iterative Magnitude Pruning
Marco Zullich, Eric Medvet, Felice Andrea Pellegrino, Alessio Ansuini
Auto-TLDR; Iterative Pruning of Artificial Neural Networks with Overparametrization
Abstract Slides Poster Similar
Detecting Objects with High Object Region Percentage
Fen Fang, Qianli Xu, Liyuan Li, Ying Gu, Joo-Hwee Lim

Auto-TLDR; Faster R-CNN for High-ORP Object Detection
Abstract Slides Poster Similar
ScarfNet: Multi-Scale Features with Deeply Fused and Redistributed Semantics for Enhanced Object Detection
Jin Hyeok Yoo, Dongsuk Kum, Jun Won Choi
Auto-TLDR; Semantic Fusion of Multi-scale Feature Maps for Object Detection
Abstract Slides Poster Similar
Fast and Accurate Real-Time Semantic Segmentation with Dilated Asymmetric Convolutions
Leonel Rosas-Arias, Gibran Benitez-Garcia, Jose Portillo-Portillo, Gabriel Sanchez-Perez, Keiji Yanai

Auto-TLDR; FASSD-Net: Dilated Asymmetric Pyramidal Fusion for Real-Time Semantic Segmentation
Abstract Slides Poster Similar
Triplet-Path Dilated Network for Detection and Segmentation of General Pathological Images
Jiaqi Luo, Zhicheng Zhao, Fei Su, Limei Guo
Auto-TLDR; Triplet-path Network for One-Stage Object Detection and Segmentation in Pathological Images
ACRM: Attention Cascade R-CNN with Mix-NMS for Metallic Surface Defect Detection
Junting Fang, Xiaoyang Tan, Yuhui Wang

Auto-TLDR; Attention Cascade R-CNN with Mix Non-Maximum Suppression for Robust Metal Defect Detection
Abstract Slides Poster Similar
CCA: Exploring the Possibility of Contextual Camouflage Attack on Object Detection
Shengnan Hu, Yang Zhang, Sumit Laha, Ankit Sharma, Hassan Foroosh
Auto-TLDR; Contextual camouflage attack for object detection
Abstract Slides Poster Similar
Mobile Phone Surface Defect Detection Based on Improved Faster R-CNN
Tao Wang, Can Zhang, Runwei Ding, Ge Yang
Auto-TLDR; Faster R-CNN for Mobile Phone Surface Defect Detection
Abstract Slides Poster Similar