NAS-EOD: An End-To-End Neural Architecture Search Method for Efficient Object Detection
Huigang Zhang,
Liuan Wang,
Jun Sun,
Li Sun,
Hiromichi Kobashi,
Nobutaka Imamura
Auto-TLDR; NAS-EOD: Neural Architecture Search for Object Detection on Edge Devices
Similar papers
VPU Specific CNNs through Neural Architecture Search
Ciarán Donegan, Hamza Yous, Saksham Sinha, Jonathan Byrne
Auto-TLDR; Efficient Convolutional Neural Networks for Edge Devices using Neural Architecture Search
Abstract Slides Poster Similar
E-DNAS: Differentiable Neural Architecture Search for Embedded Systems
Javier García López, Antonio Agudo, Francesc Moreno-Noguer
Auto-TLDR; E-DNAS: Differentiable Architecture Search for Light-Weight Networks for Image Classification
Abstract Slides Poster Similar
EDD-Net: An Efficient Defect Detection Network
Tianyu Guo, Linlin Zhang, Runwei Ding, Ge Yang
Auto-TLDR; EfficientNet: Efficient Network for Mobile Phone Surface defect Detection
Abstract Slides Poster Similar
ScarfNet: Multi-Scale Features with Deeply Fused and Redistributed Semantics for Enhanced Object Detection
Jin Hyeok Yoo, Dongsuk Kum, Jun Won Choi
Auto-TLDR; Semantic Fusion of Multi-scale Feature Maps for Object Detection
Abstract Slides Poster Similar
Operation and Topology Aware Fast Differentiable Architecture Search
Shahid Siddiqui, Christos Kyrkou, Theocharis Theocharides
Auto-TLDR; EDARTS: Efficient Differentiable Architecture Search with Efficient Optimization
Abstract Slides Poster Similar
OCT Image Segmentation Using NeuralArchitecture Search and SRGAN
Saba Heidari, Omid Dehzangi, Nasser M. Nasarabadi, Ali Rezai
Auto-TLDR; Automatic Segmentation of Retinal Layers in Optical Coherence Tomography using Neural Architecture Search
P2 Net: Augmented Parallel-Pyramid Net for Attention Guided Pose Estimation
Luanxuan Hou, Jie Cao, Yuan Zhao, Haifeng Shen, Jian Tang, Ran He
Auto-TLDR; Parallel-Pyramid Net with Partial Attention for Human Pose Estimation
Abstract Slides Poster Similar
Object Detection Model Based on Scene-Level Region Proposal Self-Attention
Yu Quan, Zhixin Li, Canlong Zhang, Huifang Ma
Auto-TLDR; Exploiting Semantic Informations for Object Detection
Abstract Slides Poster Similar
Stage-Wise Neural Architecture Search
Artur Jordão, Fernando Akio Yamada, Maiko Lie, William Schwartz
Auto-TLDR; Efficient Neural Architecture Search for Deep Convolutional Networks
Abstract Slides Poster Similar
Resource-efficient DNNs for Keyword Spotting using Neural Architecture Search and Quantization
David Peter, Wolfgang Roth, Franz Pernkopf
Auto-TLDR; Neural Architecture Search for Keyword Spotting in Limited Resource Environments
Abstract Slides Poster Similar
Fine-Tuning DARTS for Image Classification
Muhammad Suhaib Tanveer, Umar Karim Khan, Chong Min Kyung
Auto-TLDR; Fine-Tune Neural Architecture Search using Fixed Operations
Abstract Slides Poster Similar
Neural Architecture Search for Image Super-Resolution Using Densely Connected Search Space: DeCoNAS
Auto-TLDR; DeCoNASNet: Automated Neural Architecture Search for Super-Resolution
Abstract Slides Poster Similar
Fast, Accurate and Lightweight Super-Resolution with Neural Architecture Search
Chu Xiangxiang, Bo Zhang, Micheal Ma Hailong, Ruijun Xu, Jixiang Li, Qingyuan Li
Auto-TLDR; Multi-Objective Neural Architecture Search for Super-Resolution
Abstract Slides Poster Similar
Construction Worker Hardhat-Wearing Detection Based on an Improved BiFPN
Chenyang Zhang, Zhiqiang Tian, Jingyi Song, Yaoyue Zheng, Bo Xu

Auto-TLDR; A One-Stage Object Detection Method for Hardhat-Wearing in Construction Site
Abstract Slides Poster Similar
Object Detection in the DCT Domain: Is Luminance the Solution?
Benjamin Deguerre, Clement Chatelain, Gilles Gasso

Auto-TLDR; Jpeg Deep: Object Detection Using Compressed JPEG Images
Abstract Slides Poster Similar
Efficient-Receptive Field Block with Group Spatial Attention Mechanism for Object Detection
Jiacheng Zhang, Zhicheng Zhao, Fei Su
Auto-TLDR; E-RFB: Efficient-Receptive Field Block for Deep Neural Network for Object Detection
Abstract Slides Poster Similar
Bidirectional Matrix Feature Pyramid Network for Object Detection
Auto-TLDR; BMFPN: Bidirectional Matrix Feature Pyramid Network for Object Detection
Abstract Slides Poster Similar
Fast and Accurate Real-Time Semantic Segmentation with Dilated Asymmetric Convolutions
Leonel Rosas-Arias, Gibran Benitez-Garcia, Jose Portillo-Portillo, Gabriel Sanchez-Perez, Keiji Yanai

Auto-TLDR; FASSD-Net: Dilated Asymmetric Pyramidal Fusion for Real-Time Semantic Segmentation
Abstract Slides Poster Similar
A Modified Single-Shot Multibox Detector for Beyond Real-Time Object Detection
Georgios Orfanidis, Konstantinos Ioannidis, Stefanos Vrochidis, Anastasios Tefas, Ioannis Kompatsiaris
Auto-TLDR; Single Shot Detector in Resource-Restricted Systems with Lighter SSD Variations
Abstract Slides Poster Similar
Dynamic Multi-Path Neural Network
Yingcheng Su, Yichao Wu, Ken Chen, Ding Liang, Xiaolin Hu

Auto-TLDR; Dynamic Multi-path Neural Network
A Novel Region of Interest Extraction Layer for Instance Segmentation
Leonardo Rossi, Akbar Karimi, Andrea Prati
Auto-TLDR; Generic RoI Extractor for Two-Stage Neural Network for Instance Segmentation
Abstract Slides Poster Similar
SFPN: Semantic Feature Pyramid Network for Object Detection
Auto-TLDR; SFPN: Semantic Feature Pyramid Network to Address Information Dilution Issue in FPN
Abstract Slides Poster Similar
A Fast and Accurate Object Detector for Handwritten Digit String Recognition
Jun Guo, Wenjing Wei, Yifeng Ma, Cong Peng
Auto-TLDR; ChipNet: An anchor-free object detector for handwritten digit string recognition
Abstract Slides Poster Similar
Forground-Guided Vehicle Perception Framework
Kun Tian, Tong Zhou, Shiming Xiang, Chunhong Pan

Auto-TLDR; A foreground segmentation branch for vehicle detection
Abstract Slides Poster Similar
Multiple-Step Sampling for Dense Object Detection and Counting
Auto-TLDR; Multiple-Step Sampling for Dense Objects Detection
Abstract Slides Poster Similar
Compression of YOLOv3 Via Block-Wise and Channel-Wise Pruning for Real-Time and Complicated Autonomous Driving Environment Sensing Applications
Jiaqi Li, Yanan Zhao, Li Gao, Feng Cui
Auto-TLDR; Pruning YOLOv3 with Batch Normalization for Autonomous Driving
Abstract Slides Poster Similar
Small Object Detection by Generative and Discriminative Learning
Yi Gu, Jie Li, Chentao Wu, Weijia Jia, Jianping Chen
Auto-TLDR; Generative and Discriminative Learning for Small Object Detection
Abstract Slides Poster Similar
Hierarchical Head Design for Object Detectors
Shivang Agarwal, Frederic Jurie
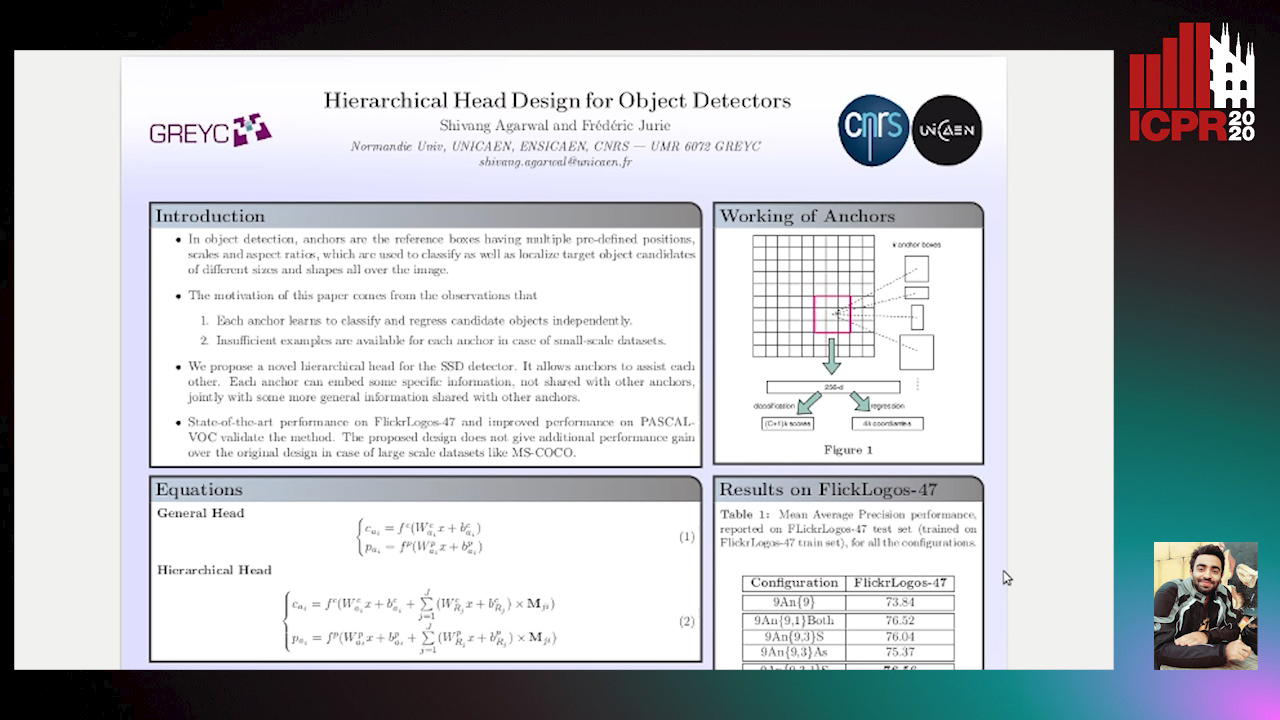
Auto-TLDR; Hierarchical Anchor for SSD Detector
Abstract Slides Poster Similar
Learning a Dynamic High-Resolution Network for Multi-Scale Pedestrian Detection
Mengyuan Ding, Shanshan Zhang, Jian Yang

Auto-TLDR; Learningable Dynamic HRNet for Pedestrian Detection
Abstract Slides Poster Similar
Deep Real-Time Hand Detection Using CFPN on Embedded Systems
Pirdiansyah Hendri, Jun-Wei Hsieh, Ping Yang Chen
Auto-TLDR; Concatenated Feature Pyramid Network for Small Hand Detection on Embedded Devices
Abstract Slides Poster Similar
Channel Planting for Deep Neural Networks Using Knowledge Distillation
Kakeru Mitsuno, Yuichiro Nomura, Takio Kurita
Auto-TLDR; Incremental Training for Deep Neural Networks with Knowledge Distillation
Abstract Slides Poster Similar
Yolo+FPN: 2D and 3D Fused Object Detection with an RGB-D Camera

Auto-TLDR; Yolo+FPN: Combining 2D and 3D Object Detection for Real-Time Object Detection
Abstract Slides Poster Similar
Automatic Student Network Search for Knowledge Distillation
Zhexi Zhang, Wei Zhu, Junchi Yan, Peng Gao, Guotong Xie

Auto-TLDR; NAS-KD: Knowledge Distillation for BERT
Abstract Slides Poster Similar
HFP: Hardware-Aware Filter Pruning for Deep Convolutional Neural Networks Acceleration
Fang Yu, Chuanqi Han, Pengcheng Wang, Ruoran Huang, Xi Huang, Li Cui
Auto-TLDR; Hardware-Aware Filter Pruning for Convolutional Neural Networks
Abstract Slides Poster Similar
Neural Compression and Filtering for Edge-assisted Real-time Object Detection in Challenged Networks
Yoshitomo Matsubara, Marco Levorato
Auto-TLDR; Deep Neural Networks for Remote Object Detection Using Edge Computing
Abstract Slides Poster Similar
Towards Low-Bit Quantization of Deep Neural Networks with Limited Data
Yong Yuan, Chen Chen, Xiyuan Hu, Silong Peng
Auto-TLDR; Low-Precision Quantization of Deep Neural Networks with Limited Data
Abstract Slides Poster Similar
Detecting Objects with High Object Region Percentage
Fen Fang, Qianli Xu, Liyuan Li, Ying Gu, Joo-Hwee Lim

Auto-TLDR; Faster R-CNN for High-ORP Object Detection
Abstract Slides Poster Similar
CenterRepp: Predict Central Representative Point Set's Distribution for Detection
Yulin He, Limeng Zhang, Wei Chen, Xin Luo, Chen Li, Xiaogang Jia
Auto-TLDR; CRPDet: CenterRepp Detector for Object Detection
Abstract Slides Poster Similar
Tiny Object Detection in Aerial Images
Jinwang Wang, Wen Yang, Haowen Guo, Ruixiang Zhang, Gui-Song Xia
Auto-TLDR; Tiny Object Detection in Aerial Images Using Multiple Center Points Based Learning Network
Adaptive Remote Sensing Image Attribute Learning for Active Object Detection
Nuo Xu, Chunlei Huo, Chunhong Pan
Auto-TLDR; Adaptive Image Attribute Learning for Active Object Detection
CASNet: Common Attribute Support Network for Image Instance and Panoptic Segmentation
Xiaolong Liu, Yuqing Hou, Anbang Yao, Yurong Chen, Keqiang Li

Auto-TLDR; Common Attribute Support Network for instance segmentation and panoptic segmentation
Abstract Slides Poster Similar
SyNet: An Ensemble Network for Object Detection in UAV Images

Auto-TLDR; SyNet: Combining Multi-Stage and Single-Stage Object Detection for Aerial Images
Object Detection on Monocular Images with Two-Dimensional Canonical Correlation Analysis

Auto-TLDR; Multi-Task Object Detection from Monocular Images Using Multimodal RGB and Depth Data
Abstract Slides Poster Similar
Improved Residual Networks for Image and Video Recognition
Ionut Cosmin Duta, Li Liu, Fan Zhu, Ling Shao
Auto-TLDR; Residual Networks for Deep Learning
Abstract Slides Poster Similar
AOAM: Automatic Optimization of Adjacency Matrix for Graph Convolutional Network
Yuhang Zhang, Hongshuai Ren, Jiexia Ye, Xitong Gao, Yang Wang, Kejiang Ye, Cheng-Zhong Xu
Auto-TLDR; Adjacency Matrix for Graph Convolutional Network in Non-Euclidean Space
Abstract Slides Poster Similar
Hybrid Cascade Point Search Network for High Precision Bar Chart Component Detection
Junyu Luo, Jinpeng Wang, Chin-Yew Lin
Auto-TLDR; Object Detection of Chart Components in Chart Images Using Point-based and Region-Based Object Detection Framework
Abstract Slides Poster Similar
FastSal: A Computationally Efficient Network for Visual Saliency Prediction
Auto-TLDR; MobileNetV2: A Convolutional Neural Network for Saliency Prediction
Abstract Slides Poster Similar
MagnifierNet: Learning Efficient Small-Scale Pedestrian Detector towards Multiple Dense Regions
Qi Cheng, Mingqin Chen, Yingjie Wu, Fei Chen, Shiping Lin

Auto-TLDR; MagnifierNet: A Simple but Effective Small-Scale Pedestrian Detection Towards Multiple Dense Regions
Abstract Slides Poster Similar