5D Light Field Synthesis from a Monocular Video
Kyuho Bae,
Andre Ivan,
Hajime Nagahara,
In Kyu Park

Auto-TLDR; Synthesis of Light Field Video from Monocular Video using Deep Learning
Similar papers
Residual Learning of Video Frame Interpolation Using Convolutional LSTM
Auto-TLDR; Video Frame Interpolation Using Residual Learning and Convolutional LSTMs
Abstract Slides Poster Similar
Real-Time Monocular Depth Estimation with Extremely Light-Weight Neural Network
Mian Jhong Chiu, Wei-Chen Chiu, Hua-Tsung Chen, Jen-Hui Chuang

Auto-TLDR; Real-Time Light-Weight Depth Prediction for Obstacle Avoidance and Environment Sensing with Deep Learning-based CNN
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Fast and Efficient Neural Network for Light Field Disparity Estimation
Auto-TLDR; Improving Efficient Light Field Disparity Estimation Using Deep Neural Networks
Abstract Slides Poster Similar
Novel View Synthesis from a 6-DoF Pose by Two-Stage Networks
Xiang Guo, Bo Li, Yuchao Dai, Tongxin Zhang, Hui Deng
Auto-TLDR; Novel View Synthesis from a 6-DoF Pose Using Generative Adversarial Network
Abstract Slides Poster Similar
A Novel Deep-Learning Pipeline for Light Field Image Based Material Recognition
Yunlong Wang, Kunbo Zhang, Zhenan Sun
Auto-TLDR; Factorize-Connect-Merge Deep Learning Pipeline for Light Field Image Based Material Recognition
Cost Volume Refinement for Depth Prediction
João L. Cardoso, Nuno Goncalves, Michael Wimmer

Auto-TLDR; Refining the Cost Volume for Depth Prediction from Light Field Cameras
Abstract Slides Poster Similar
SIDGAN: Single Image Dehazing without Paired Supervision
Pan Wei, Xin Wang, Lei Wang, Ji Xiang, Zihan Wang
Auto-TLDR; DehazeGAN: An End-to-End Generative Adversarial Network for Image Dehazing
Abstract Slides Poster Similar
Video Reconstruction by Spatio-Temporal Fusion of Blurred-Coded Image Pair
Anupama S, Prasan Shedligeri, Abhishek Pal, Kaushik Mitr
Auto-TLDR; Recovering Video from Motion-Blurred and Coded Exposure Images Using Deep Learning
Abstract Slides Poster Similar
Partially Supervised Multi-Task Network for Single-View Dietary Assessment
Ya Lu, Thomai Stathopoulou, Stavroula Mougiakakou

Auto-TLDR; Food Volume Estimation from a Single Food Image via Geometric Understanding and Semantic Prediction
Abstract Slides Poster Similar
Let's Play Music: Audio-Driven Performance Video Generation
Hao Zhu, Yi Li, Feixia Zhu, Aihua Zheng, Ran He
Auto-TLDR; APVG: Audio-driven Performance Video Generation Using Structured Temporal UNet
Abstract Slides Poster Similar
P2D: A Self-Supervised Method for Depth Estimation from Polarimetry
Marc Blanchon, Desire Sidibe, Olivier Morel, Ralph Seulin, Daniel Braun, Fabrice Meriaudeau

Auto-TLDR; Polarimetric Regularization for Monocular Depth Estimation
Abstract Slides Poster Similar
Object Segmentation Tracking from Generic Video Cues
Amirhossein Kardoost, Sabine Müller, Joachim Weickert, Margret Keuper

Auto-TLDR; A Light-Weight Variational Framework for Video Object Segmentation in Videos
Abstract Slides Poster Similar
Multi-Scale Residual Pyramid Attention Network for Monocular Depth Estimation
Jing Liu, Xiaona Zhang, Zhaoxin Li, Tianlu Mao

Auto-TLDR; Multi-scale Residual Pyramid Attention Network for Monocular Depth Estimation
Abstract Slides Poster Similar
Movement-Induced Priors for Deep Stereo
Yuxin Hou, Muhammad Kamran Janjua, Juho Kannala, Arno Solin

Auto-TLDR; Fusing Stereo Disparity Estimation with Movement-induced Prior Information
Abstract Slides Poster Similar
Hybrid Approach for 3D Head Reconstruction: Using Neural Networks and Visual Geometry
Oussema Bouafif, Bogdan Khomutenko, Mohammed Daoudi

Auto-TLDR; Recovering 3D Head Geometry from a Single Image using Deep Learning and Geometric Techniques
Abstract Slides Poster Similar
Video Lightening with Dedicated CNN Architecture
Li-Wen Wang, Wan-Chi Siu, Zhi-Song Liu, Chu-Tak Li, P. K. Daniel Lun
Auto-TLDR; VLN: Video Lightening Network for Driving Assistant Systems in Dark Environment
Abstract Slides Poster Similar
Wavelet Attention Embedding Networks for Video Super-Resolution
Young-Ju Choi, Young-Woon Lee, Byung-Gyu Kim
Auto-TLDR; Wavelet Attention Embedding Network for Video Super-Resolution
Abstract Slides Poster Similar
Removing Raindrops from a Single Image Using Synthetic Data
Yoshihito Kokubo, Shusaku Asada, Hirotaka Maruyama, Masaru Koide, Kohei Yamamoto, Yoshihisa Suetsugu
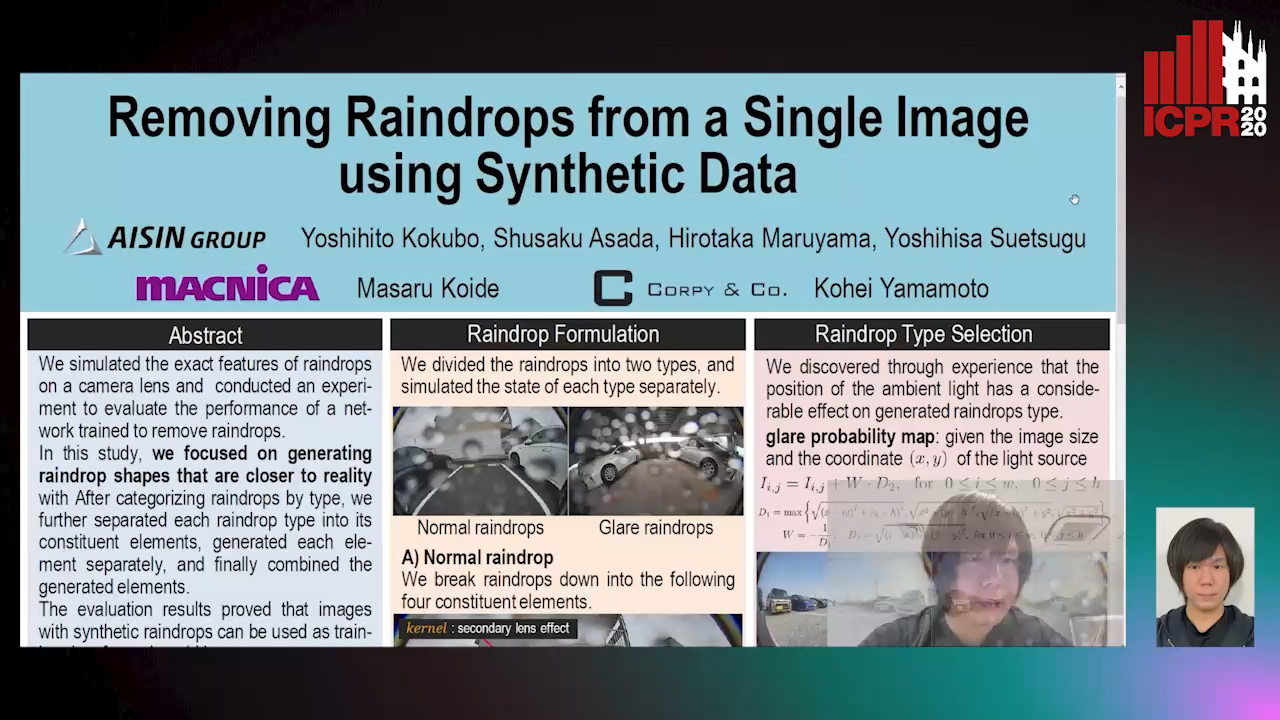
Auto-TLDR; Raindrop Removal Using Synthetic Raindrop Data
Abstract Slides Poster Similar
Deep Photo Relighting by Integrating Both 2D and 3D Lighting Information
Takashi Machida, Satoru Nakanishi
Auto-TLDR; DPR: Deep Photorelighting for Image Detection/Classification and Data Augmentation
Abstract Slides Poster Similar
STaRFlow: A SpatioTemporal Recurrent Cell for Lightweight Multi-Frame Optical Flow Estimation
Pierre Godet, Alexandre Boulch, Aurélien Plyer, Guy Le Besnerais
Auto-TLDR; STaRFlow: A lightweight CNN-based algorithm for optical flow estimation
Abstract Slides Poster Similar
Two-Stage Adaptive Object Scene Flow Using Hybrid CNN-CRF Model
Congcong Li, Haoyu Ma, Qingmin Liao

Auto-TLDR; Adaptive object scene flow estimation using a hybrid CNN-CRF model and adaptive iteration
Abstract Slides Poster Similar
Deep Realistic Novel View Generation for City-Scale Aerial Images
Koundinya Nouduri, Ke Gao, Joshua Fraser, Shizeng Yao, Hadi Aliakbarpour, Filiz Bunyak, Kannappan Palaniappan
Auto-TLDR; End-to-End 3D Voxel Renderer for Multi-View Stereo Data Generation and Evaluation
Abstract Slides Poster Similar
Towards Artifacts-Free Image Defogging
Gabriele Graffieti, Davide Maltoni
Auto-TLDR; CurL-Defog: Learning Based Defogging with CycleGAN and HArD
Delivering Meaningful Representation for Monocular Depth Estimation
Doyeon Kim, Donggyu Joo, Junmo Kim

Auto-TLDR; Monocular Depth Estimation by Bridging the Context between Encoding and Decoding
Abstract Slides Poster Similar
Motion-Supervised Co-Part Segmentation
Aliaksandr Siarohin, Subhankar Roy, Stéphane Lathuiliere, Sergey Tulyakov, Elisa Ricci, Nicu Sebe
Auto-TLDR; Self-supervised Co-Part Segmentation Using Motion Information from Videos
Free-Form Image Inpainting Via Contrastive Attention Network
Xin Ma, Xiaoqiang Zhou, Huaibo Huang, Zhenhua Chai, Xiaolin Wei, Ran He
Auto-TLDR; Self-supervised Siamese inference for image inpainting
Single Image Deblurring Using Bi-Attention Network

Auto-TLDR; Bi-Attention Neural Network for Single Image Deblurring
Automatical Enhancement and Denoising of Extremely Low-Light Images
Yuda Song, Yunfang Zhu, Xin Du
Auto-TLDR; INSNet: Illumination and Noise Separation Network for Low-Light Image Restoring
Abstract Slides Poster Similar
Mask-Based Style-Controlled Image Synthesis Using a Mask Style Encoder
Jaehyeong Cho, Wataru Shimoda, Keiji Yanai
Auto-TLDR; Style-controlled Image Synthesis from Semantic Segmentation masks using GANs
Abstract Slides Poster Similar
Learning to Take Directions One Step at a Time
Qiyang Hu, Adrian Wälchli, Tiziano Portenier, Matthias Zwicker, Paolo Favaro
Auto-TLDR; Generating a Sequence of Motion Strokes from a Single Image
Abstract Slides Poster Similar
Boosting High-Level Vision with Joint Compression Artifacts Reduction and Super-Resolution
Xiaoyu Xiang, Qian Lin, Jan Allebach
Auto-TLDR; A Context-Aware Joint CAR and SR Neural Network for High-Resolution Text Recognition and Face Detection
Abstract Slides Poster Similar
User-Independent Gaze Estimation by Extracting Pupil Parameter and Its Mapping to the Gaze Angle

Auto-TLDR; Gaze Point Estimation using Pupil Shape for Generalization
Abstract Slides Poster Similar
Future Urban Scenes Generation through Vehicles Synthesis
Alessandro Simoni, Luca Bergamini, Andrea Palazzi, Simone Calderara, Rita Cucchiara

Auto-TLDR; Predicting the Future of an Urban Scene with a Novel View Synthesis Paradigm
Abstract Slides Poster Similar
Detail-Revealing Deep Low-Dose CT Reconstruction
Xinchen Ye, Yuyao Xu, Rui Xu, Shoji Kido, Noriyuki Tomiyama
Auto-TLDR; A Dual-branch Aggregation Network for Low-Dose CT Reconstruction
Abstract Slides Poster Similar
TinyVIRAT: Low-Resolution Video Action Recognition
Ugur Demir, Yogesh Rawat, Mubarak Shah
Auto-TLDR; TinyVIRAT: A Progressive Generative Approach for Action Recognition in Videos
Abstract Slides Poster Similar
Ordinal Depth Classification Using Region-Based Self-Attention
Minh Hieu Phan, Son Lam Phung, Abdesselam Bouzerdoum

Auto-TLDR; Region-based Self-Attention for Multi-scale Depth Estimation from a Single 2D Image
Abstract Slides Poster Similar
Human Segmentation with Dynamic LiDAR Data
Tao Zhong, Wonjik Kim, Masayuki Tanaka, Masatoshi Okutomi

Auto-TLDR; Spatiotemporal Neural Network for Human Segmentation with Dynamic Point Clouds
Early Wildfire Smoke Detection in Videos
Taanya Gupta, Hengyue Liu, Bir Bhanu

Auto-TLDR; Semi-supervised Spatio-Temporal Video Object Segmentation for Automatic Detection of Smoke in Videos during Forest Fire
Deep Universal Blind Image Denoising
Auto-TLDR; Image Denoising with Deep Convolutional Neural Networks
Edge-Aware Monocular Dense Depth Estimation with Morphology
Zhi Li, Xiaoyang Zhu, Haitao Yu, Qi Zhang, Yongshi Jiang

Auto-TLDR; Spatio-Temporally Smooth Dense Depth Maps Using Only a CPU
Abstract Slides Poster Similar
HMFlow: Hybrid Matching Optical Flow Network for Small and Fast-Moving Objects
Suihanjin Yu, Youmin Zhang, Chen Wang, Xiao Bai, Liang Zhang, Edwin Hancock
Auto-TLDR; Hybrid Matching Optical Flow Network with Global Matching Component
Abstract Slides Poster Similar
A Multi-Task Neural Network for Action Recognition with 3D Key-Points
Rongxiao Tang, Wang Luyang, Zhenhua Guo
Auto-TLDR; Multi-task Neural Network for Action Recognition and 3D Human Pose Estimation
Abstract Slides Poster Similar
MBD-GAN: Model-Based Image Deblurring with a Generative Adversarial Network
Auto-TLDR; Model-Based Deblurring GAN for Inverse Imaging
Abstract Slides Poster Similar
Dynamic Guided Network for Monocular Depth Estimation
Xiaoxia Xing, Yinghao Cai, Yiping Yang, Dayong Wen

Auto-TLDR; DGNet: Dynamic Guidance Upsampling for Self-attention-Decoding for Monocular Depth Estimation
Abstract Slides Poster Similar
A Lightweight Network to Learn Optical Flow from Event Data

Auto-TLDR; A lightweight pyramid network with attention mechanism to learn optical flow from events data
Efficient Shadow Detection and Removal Using Synthetic Data with Domain Adaptation
Rui Guo, Babajide Ayinde, Hao Sun
Auto-TLDR; Shadow Detection and Removal with Domain Adaptation and Synthetic Image Database
Derivation of Geometrically and Semantically Annotated UAV Datasets at Large Scales from 3D City Models
Sidi Wu, Lukas Liebel, Marco Körner

Auto-TLDR; Large-Scale Dataset of Synthetic UAV Imagery for Geometric and Semantic Annotation
Abstract Slides Poster Similar