MANet: Multimodal Attention Network Based Point-View Fusion for 3D Shape Recognition
Yaxin Zhao,
Jichao Jiao,
Ning Li
Auto-TLDR; Fusion Network for 3D Shape Recognition based on Multimodal Attention Mechanism
Similar papers
PC-Net: A Deep Network for 3D Point Clouds Analysis
Zhuo Chen, Tao Guan, Yawei Luo, Yuesong Wang

Auto-TLDR; PC-Net: A Hierarchical Neural Network for 3D Point Clouds Analysis
Abstract Slides Poster Similar
Cross-Regional Attention Network for Point Cloud Completion

Auto-TLDR; Learning-based Point Cloud Repair with Graph Convolution
Abstract Slides Poster Similar
FatNet: A Feature-Attentive Network for 3D Point Cloud Processing
Chaitanya Kaul, Nick Pears, Suresh Manandhar

Auto-TLDR; Feature-Attentive Neural Networks for Point Cloud Classification and Segmentation
Deep Space Probing for Point Cloud Analysis
Yirong Yang, Bin Fan, Yongcheng Liu, Hua Lin, Jiyong Zhang, Xin Liu, 蔡鑫宇 蔡鑫宇, Shiming Xiang, Chunhong Pan

Auto-TLDR; SPCNN: Space Probing Convolutional Neural Network for Point Cloud Analysis
Abstract Slides Poster Similar
Progressive Scene Segmentation Based on Self-Attention Mechanism
Yunyi Pan, Yuan Gan, Kun Liu, Yan Zhang

Auto-TLDR; Two-Stage Semantic Scene Segmentation with Self-Attention
Abstract Slides Poster Similar
PointSpherical: Deep Shape Context for Point Cloud Learning in Spherical Coordinates
Hua Lin, Bin Fan, Yongcheng Liu, Yirong Yang, Zheng Pan, Jianbo Shi, Chunhong Pan, Huiwen Xie

Auto-TLDR; Spherical Hierarchical Modeling of 3D Point Cloud
Abstract Slides Poster Similar
3D Point Cloud Registration Based on Cascaded Mutual Information Attention Network
Auto-TLDR; Cascaded Mutual Information Attention Network for 3D Point Cloud Registration
Abstract Slides Poster Similar
Directional Graph Networks with Hard Weight Assignments
Miguel Dominguez, Raymond Ptucha
Auto-TLDR; Hard Directional Graph Networks for Point Cloud Analysis
Abstract Slides Poster Similar
PS^2-Net: A Locally and Globally Aware Network for Point-Based Semantic Segmentation
Na Zhao, Tat Seng Chua, Gim Hee Lee

Auto-TLDR; PS2-Net: A Local and Globally Aware Deep Learning Framework for Semantic Segmentation on 3D Point Clouds
Abstract Slides Poster Similar
Joint Semantic-Instance Segmentation of 3D Point Clouds: Instance Separation and Semantic Fusion
Auto-TLDR; Joint Semantic Segmentation and Instance Separation of 3D Point Clouds
Abstract Slides Poster Similar
MixedFusion: 6D Object Pose Estimation from Decoupled RGB-Depth Features
Hangtao Feng, Lu Zhang, Xu Yang, Zhiyong Liu

Auto-TLDR; MixedFusion: Combining Color and Point Clouds for 6D Pose Estimation
Abstract Slides Poster Similar
Two-Level Attention-Based Fusion Learning for RGB-D Face Recognition
Hardik Uppal, Alireza Sepas-Moghaddam, Michael Greenspan, Ali Etemad
Auto-TLDR; Fused RGB-D Facial Recognition using Attention-Aware Feature Fusion
Abstract Slides Poster Similar
Vehicle Classification from Profile Measures
Auto-TLDR; SliceNets: Convolutional Neural Networks for 3D Object Classification of Planar Slices
Towards Efficient 3D Point Cloud Scene Completion Via Novel Depth View Synthesis
Haiyan Wang, Liang Yang, Xuejian Rong, Ying-Li Tian

Auto-TLDR; 3D Point Cloud Completion with Depth View Synthesis and Depth View synthesis
Human Segmentation with Dynamic LiDAR Data
Tao Zhong, Wonjik Kim, Masayuki Tanaka, Masatoshi Okutomi

Auto-TLDR; Spatiotemporal Neural Network for Human Segmentation with Dynamic Point Clouds
Attentive Hybrid Feature Based a Two-Step Fusion for Facial Expression Recognition
Jun Weng, Yang Yang, Zichang Tan, Zhen Lei
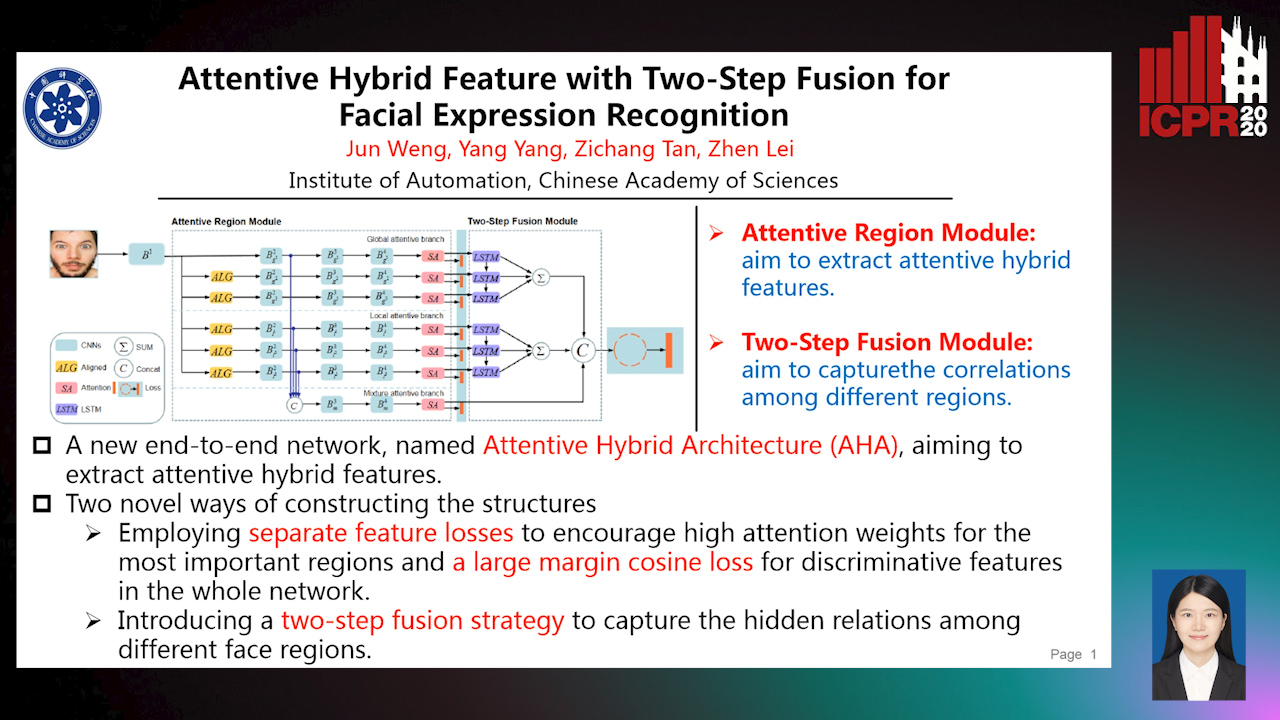
Auto-TLDR; Attentive Hybrid Architecture for Facial Expression Recognition
Abstract Slides Poster Similar
S-VoteNet: Deep Hough Voting with Spherical Proposal for 3D Object Detection
Yanxian Chen, Huimin Ma, Xi Li, Xiong Luo

Auto-TLDR; S-VoteNet: 3D Object Detection with Spherical Bounded Box Prediction
Abstract Slides Poster Similar
PSDNet: A Balanced Architecture of Accuracy and Parameters for Semantic Segmentation

Auto-TLDR; Pyramid Pooling Module with SE1Cblock and D2SUpsample Network (PSDNet)
Abstract Slides Poster Similar
Object Detection Model Based on Scene-Level Region Proposal Self-Attention
Yu Quan, Zhixin Li, Canlong Zhang, Huifang Ma
Auto-TLDR; Exploiting Semantic Informations for Object Detection
Abstract Slides Poster Similar
Boundary-Aware Graph Convolution for Semantic Segmentation
Hanzhe Hu, Jinshi Cui, Jinshi Hongbin Zha

Auto-TLDR; Boundary-Aware Graph Convolution for Semantic Segmentation
Abstract Slides Poster Similar
Enhanced Vote Network for 3D Object Detection in Point Clouds

Auto-TLDR; A Vote Feature Enhancement Network for 3D Bounding Box Prediction
Abstract Slides Poster Similar
Enhanced Feature Pyramid Network for Semantic Segmentation
Mucong Ye, Ouyang Jinpeng, Ge Chen, Jing Zhang, Xiaogang Yu
Auto-TLDR; EFPN: Enhanced Feature Pyramid Network for Semantic Segmentation
Abstract Slides Poster Similar
Global-Local Attention Network for Semantic Segmentation in Aerial Images
Minglong Li, Lianlei Shan, Weiqiang Wang

Auto-TLDR; GLANet: Global-Local Attention Network for Semantic Segmentation
Abstract Slides Poster Similar
PointDrop: Improving Object Detection from Sparse Point Clouds Via Adversarial Data Augmentation
Wenxin Ma, Jian Chen, Qing Du, Wei Jia

Auto-TLDR; PointDrop: Improving Robust 3D Object Detection to Sparse Point Clouds
Abstract Slides Poster Similar
6D Pose Estimation with Correlation Fusion
Yi Cheng, Hongyuan Zhu, Ying Sun, Cihan Acar, Wei Jing, Yan Wu, Liyuan Li, Cheston Tan, Joo-Hwee Lim

Auto-TLDR; Intra- and Inter-modality Fusion for 6D Object Pose Estimation with Attention Mechanism
Abstract Slides Poster Similar
Rethinking ReID:Multi-Feature Fusion Person Re-Identification Based on Orientation Constraints
Mingjing Ai, Guozhi Shan, Bo Liu, Tianyang Liu
Auto-TLDR; Person Re-identification with Orientation Constrained Network
Abstract Slides Poster Similar
Aggregating Object Features Based on Attention Weights for Fine-Grained Image Retrieval
Hongli Lin, Yongqi Song, Zixuan Zeng, Weisheng Wang

Auto-TLDR; DSAW: Unsupervised Dual-selection for Fine-Grained Image Retrieval
CSpA-DN: Channel and Spatial Attention Dense Network for Fusing PET and MRI Images
Bicao Li, Zhoufeng Liu, Shan Gao, Jenq-Neng Hwang, Jun Sun, Zongmin Wang
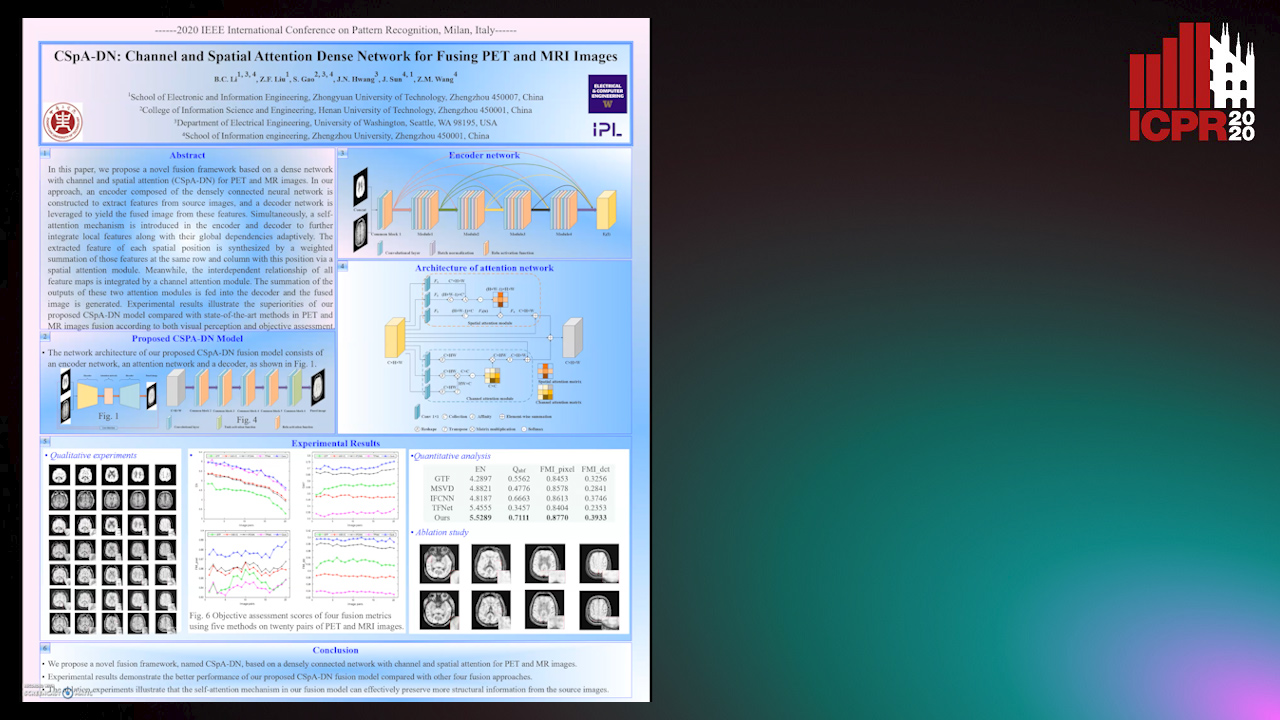
Auto-TLDR; CSpA-DN: Unsupervised Fusion of PET and MR Images with Channel and Spatial Attention
Abstract Slides Poster Similar
3D Semantic Labeling of Photogrammetry Meshes Based on Active Learning
Mengqi Rong, Shuhan Shen, Zhanyi Hu

Auto-TLDR; 3D Semantic Expression of Urban Scenes Based on Active Learning
Abstract Slides Poster Similar
Edge-Aware Graph Attention Network for Ratio of Edge-User Estimation in Mobile Networks
Jiehui Deng, Sheng Wan, Xiang Wang, Enmei Tu, Xiaolin Huang, Jie Yang, Chen Gong
Auto-TLDR; EAGAT: Edge-Aware Graph Attention Network for Automatic REU Estimation in Mobile Networks
Abstract Slides Poster Similar
Attention-Driven Body Pose Encoding for Human Activity Recognition
Bappaditya Debnath, Swagat Kumar, Marry O'Brien, Ardhendu Behera
Auto-TLDR; Attention-based Body Pose Encoding for Human Activity Recognition
Abstract Slides Poster Similar
A Multi-Head Self-Relation Network for Scene Text Recognition
Zhou Junwei, Hongchao Gao, Jiao Dai, Dongqin Liu, Jizhong Han
Auto-TLDR; Multi-head Self-relation Network for Scene Text Recognition
Abstract Slides Poster Similar
TAAN: Task-Aware Attention Network for Few-Shot Classification
Auto-TLDR; TAAN: Task-Aware Attention Network for Few-Shot Classification
Abstract Slides Poster Similar
Multi-Scale Residual Pyramid Attention Network for Monocular Depth Estimation
Jing Liu, Xiaona Zhang, Zhaoxin Li, Tianlu Mao

Auto-TLDR; Multi-scale Residual Pyramid Attention Network for Monocular Depth Estimation
Abstract Slides Poster Similar
Joint Supervised and Self-Supervised Learning for 3D Real World Challenges
Antonio Alliegro, Davide Boscaini, Tatiana Tommasi

Auto-TLDR; Self-supervision for 3D Shape Classification and Segmentation in Point Clouds
Global Context-Based Network with Transformer for Image2latex
Nuo Pang, Chun Yang, Xiaobin Zhu, Jixuan Li, Xu-Cheng Yin
Auto-TLDR; Image2latex with Global Context block and Transformer
Abstract Slides Poster Similar
Efficient-Receptive Field Block with Group Spatial Attention Mechanism for Object Detection
Jiacheng Zhang, Zhicheng Zhao, Fei Su
Auto-TLDR; E-RFB: Efficient-Receptive Field Block for Deep Neural Network for Object Detection
Abstract Slides Poster Similar
Incorporating Depth Information into Few-Shot Semantic Segmentation
Yifei Zhang, Desire Sidibe, Olivier Morel, Fabrice Meriaudeau

Auto-TLDR; RDNet: A Deep Neural Network for Few-shot Segmentation Using Depth Information
Abstract Slides Poster Similar
Cross-View Relation Networks for Mammogram Mass Detection
Ma Jiechao, Xiang Li, Hongwei Li, Ruixuan Wang, Bjoern Menze, Wei-Shi Zheng
Auto-TLDR; Multi-view Modeling for Mass Detection in Mammogram
Abstract Slides Poster Similar
Object Detection Using Dual Graph Network
Shengjia Chen, Zhixin Li, Feicheng Huang, Canlong Zhang, Huifang Ma
Auto-TLDR; A Graph Convolutional Network for Object Detection with Key Relation Information
Dual-Attention Guided Dropblock Module for Weakly Supervised Object Localization
Junhui Yin, Siqing Zhang, Dongliang Chang, Zhanyu Ma, Jun Guo
Auto-TLDR; Dual-Attention Guided Dropblock for Weakly Supervised Object Localization
Abstract Slides Poster Similar
Cross-Media Hash Retrieval Using Multi-head Attention Network
Zhixin Li, Feng Ling, Chuansheng Xu, Canlong Zhang, Huifang Ma
Auto-TLDR; Unsupervised Cross-Media Hash Retrieval Using Multi-Head Attention Network
Abstract Slides Poster Similar
Face Anti-Spoofing Using Spatial Pyramid Pooling
Lei Shi, Zhuo Zhou, Zhenhua Guo

Auto-TLDR; Spatial Pyramid Pooling for Face Anti-Spoofing
Abstract Slides Poster Similar
Enhancing Deep Semantic Segmentation of RGB-D Data with Entangled Forests
Matteo Terreran, Elia Bonetto, Stefano Ghidoni

Auto-TLDR; FuseNet: A Lighter Deep Learning Model for Semantic Segmentation
Abstract Slides Poster Similar
Learning Interpretable Representation for 3D Point Clouds
Feng-Guang Su, Ci-Siang Lin, Yu-Chiang Frank Wang
Auto-TLDR; Disentangling Body-type and Pose Information from 3D Point Clouds Using Adversarial Learning
Abstract Slides Poster Similar
Yolo+FPN: 2D and 3D Fused Object Detection with an RGB-D Camera

Auto-TLDR; Yolo+FPN: Combining 2D and 3D Object Detection for Real-Time Object Detection
Abstract Slides Poster Similar
UHRSNet: A Semantic Segmentation Network Specifically for Ultra-High-Resolution Images
Auto-TLDR; Ultra-High-Resolution Segmentation with Local and Global Feature Fusion
Ghost Target Detection in 3D Radar Data Using Point Cloud Based Deep Neural Network
Mahdi Chamseddine, Jason Rambach, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; Point Based Deep Learning for Ghost Target Detection in 3D Radar Point Clouds
Abstract Slides Poster Similar