A Bayesian Approach to Reinforcement Learning of Vision-Based Vehicular Control
Zahra Gharaee,
Karl Holmquist,
Linbo He,
Michael Felsberg

Auto-TLDR; Bayesian Reinforcement Learning for Autonomous Driving
Similar papers
The Effect of Multi-Step Methods on Overestimation in Deep Reinforcement Learning
Lingheng Meng, Rob Gorbet, Dana Kulić
Auto-TLDR; Multi-Step DDPG for Deep Reinforcement Learning
Abstract Slides Poster Similar
Deep Reinforcement Learning for Autonomous Driving by Transferring Visual Features
Hongli Zhou, Guanwen Zhang, Wei Zhou
Auto-TLDR; Deep Reinforcement Learning for Autonomous Driving by Transferring Visual Features
Abstract Slides Poster Similar
Learning from Learners: Adapting Reinforcement Learning Agents to Be Competitive in a Card Game
Pablo Vinicius Alves De Barros, Ana Tanevska, Alessandra Sciutti
Auto-TLDR; Adaptive Reinforcement Learning for Competitive Card Games
Abstract Slides Poster Similar
Low Dimensional State Representation Learning with Reward-Shaped Priors
Nicolò Botteghi, Ruben Obbink, Daan Geijs, Mannes Poel, Beril Sirmacek, Christoph Brune, Abeje Mersha, Stefano Stramigioli

Auto-TLDR; Unsupervised Learning for Unsupervised Reinforcement Learning in Robotics
Deep Reinforcement Learning on a Budget: 3D Control and Reasoning without a Supercomputer
Edward Beeching, Jilles Steeve Dibangoye, Olivier Simonin, Christian Wolf
Auto-TLDR; Deep Reinforcement Learning in Mobile Robots Using 3D Environment Scenarios
Abstract Slides Poster Similar
AVD-Net: Attention Value Decomposition Network for Deep Multi-Agent Reinforcement Learning
Zhang Yuanxin, Huimin Ma, Yu Wang
Auto-TLDR; Attention Value Decomposition Network for Cooperative Multi-agent Reinforcement Learning
Abstract Slides Poster Similar
On Embodied Visual Navigation in Real Environments through Habitat
Marco Rosano, Antonino Furnari, Luigi Gulino, Giovanni Maria Farinella

Auto-TLDR; Learning Navigation Policies on Real World Observations using Real World Images and Sensor and Actuation Noise
Abstract Slides Poster Similar
Object-Oriented Map Exploration and Construction Based on Auxiliary Task Aided DRL
Junzhe Xu, Jianhua Zhang, Shengyong Chen, Honghai Liu

Auto-TLDR; Auxiliary Task Aided Deep Reinforcement Learning for Environment Exploration by Autonomous Robots
Meta Learning Via Learned Loss
Sarah Bechtle, Artem Molchanov, Yevgen Chebotar, Edward Thomas Grefenstette, Ludovic Righetti, Gaurav Sukhatme, Franziska Meier
Auto-TLDR; meta-learning for learning parametric loss functions that generalize across different tasks and model architectures
Can Reinforcement Learning Lead to Healthy Life?: Simulation Study Based on User Activity Logs
Masami Takahashi, Masahiro Kohjima, Takeshi Kurashima, Hiroyuki Toda
Auto-TLDR; Reinforcement Learning for Healthy Daily Life
Abstract Slides Poster Similar
Vacant Parking Space Detection Based on Task Consistency and Reinforcement Learning
Manh Hung Nguyen, Tzu-Yin Chao, Ching-Chun Huang
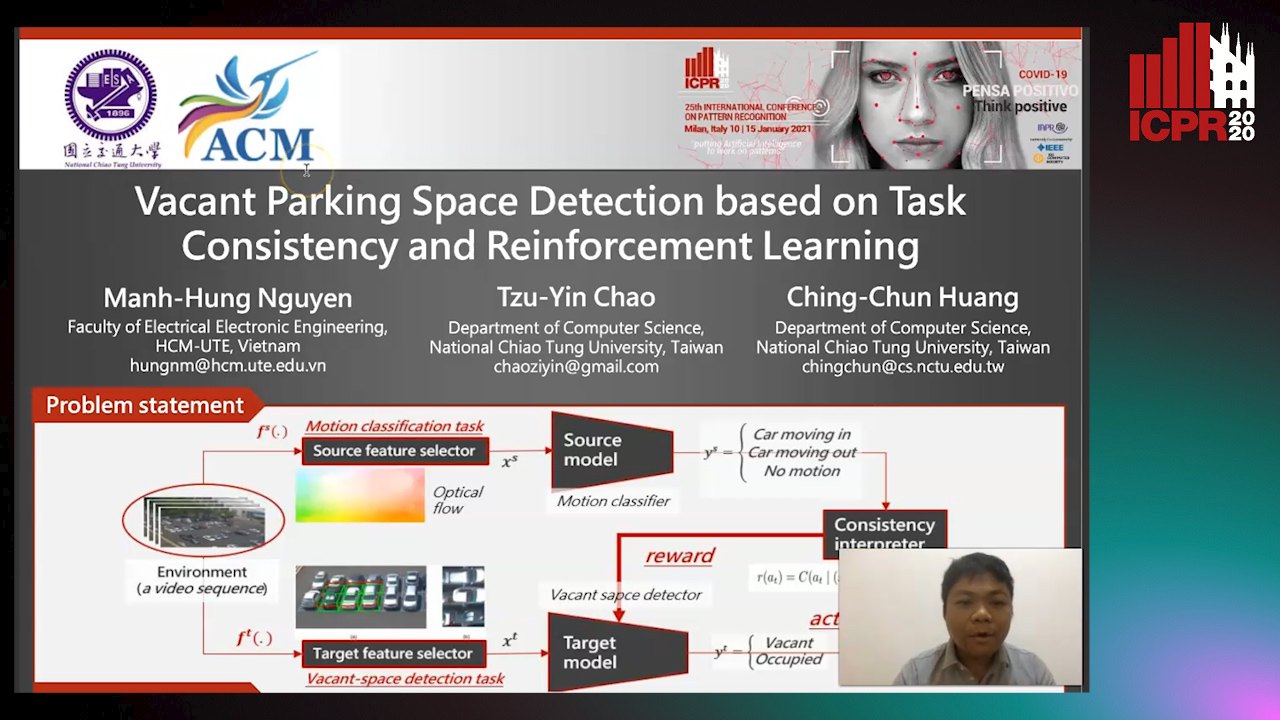
Auto-TLDR; Vacant Space Detection via Semantic Consistency Learning
Abstract Slides Poster Similar
Real-Time End-To-End Lane ID Estimation Using Recurrent Networks
Ibrahim Halfaoui, Fahd Bouzaraa, Onay Urfalioglu

Auto-TLDR; Real-Time, Vision-Only Lane Identification Using Monocular Camera
Abstract Slides Poster Similar
Explore and Explain: Self-Supervised Navigation and Recounting
Roberto Bigazzi, Federico Landi, Marcella Cornia, Silvia Cascianelli, Lorenzo Baraldi, Rita Cucchiara
Auto-TLDR; Exploring a Photorealistic Environment for Explanation and Navigation
Multiple Future Prediction Leveraging Synthetic Trajectories
Lorenzo Berlincioni, Federico Becattini, Lorenzo Seidenari, Alberto Del Bimbo

Auto-TLDR; Synthetic Trajectory Prediction using Markov Chains
Abstract Slides Poster Similar
Holistic Grid Fusion Based Stop Line Estimation
Runsheng Xu, Faezeh Tafazzoli, Li Zhang, Timo Rehfeld, Gunther Krehl, Arunava Seal

Auto-TLDR; Fused Multi-Sensory Data for Stop Lines Detection in Intersection Scenarios
ActionSpotter: Deep Reinforcement Learning Framework for Temporal Action Spotting in Videos
Guillaume Vaudaux-Ruth, Adrien Chan-Hon-Tong, Catherine Achard
Auto-TLDR; ActionSpotter: A Reinforcement Learning Algorithm for Action Spotting in Video
Abstract Slides Poster Similar
Multimodal End-To-End Learning for Autonomous Steering in Adverse Road and Weather Conditions
Jyri Sakari Maanpää, Josef Taher, Petri Manninen, Leo Pakola, Iaroslav Melekhov, Juha Hyyppä

Auto-TLDR; End-to-End Learning for Autonomous Steering in Adverse Road and Weather Conditions with Lidar Data
Abstract Slides Poster Similar
Detecting and Adapting to Crisis Pattern with Context Based Deep Reinforcement Learning
Eric Benhamou, David Saltiel Saltiel, Jean-Jacques Ohana Ohana, Jamal Atif Atif

Auto-TLDR; Deep Reinforcement Learning for Financial Crisis Detection and Dis-Investment
Abstract Slides Poster Similar
A Novel Actor Dual-Critic Model for Remote Sensing Image Captioning
Ruchika Chavhan, Biplab Banerjee, Xiao Xiang Zhu, Subhasis Chaudhuri
Auto-TLDR; Actor Dual-Critic Training for Remote Sensing Image Captioning Using Deep Reinforcement Learning
Abstract Slides Poster Similar
Improving Robotic Grasping on Monocular Images Via Multi-Task Learning and Positional Loss
William Prew, Toby Breckon, Magnus Bordewich, Ulrik Beierholm

Auto-TLDR; Improving grasping performance from monocularcolour images in an end-to-end CNN architecture with multi-task learning
Abstract Slides Poster Similar
Deep Next-Best-View Planner for Cross-Season Visual Route Classification
Auto-TLDR; Active Visual Place Recognition using Deep Convolutional Neural Network
Abstract Slides Poster Similar
Trajectory Representation Learning for Multi-Task NMRDP Planning
Firas Jarboui, Vianney Perchet
Auto-TLDR; Exploring Non Markovian Reward Decision Processes for Reinforcement Learning
Abstract Slides Poster Similar
Visual Object Tracking in Drone Images with Deep Reinforcement Learning

Auto-TLDR; A Deep Reinforcement Learning based Single Object Tracker for Drone Applications
Abstract Slides Poster Similar
Visual Prediction of Driver Behavior in Shared Road Areas
Peter Gawronski, Darius Burschka
Auto-TLDR; Predicting Vehicle Behavior in Shared Road Segment Intersections Using Topological Knowledge
Abstract Slides Poster Similar
AOAM: Automatic Optimization of Adjacency Matrix for Graph Convolutional Network
Yuhang Zhang, Hongshuai Ren, Jiexia Ye, Xitong Gao, Yang Wang, Kejiang Ye, Cheng-Zhong Xu
Auto-TLDR; Adjacency Matrix for Graph Convolutional Network in Non-Euclidean Space
Abstract Slides Poster Similar
Self-Play or Group Practice: Learning to Play Alternating Markov Game in Multi-Agent System
Chin-Wing Leung, Shuyue Hu, Ho-Fung Leung
Auto-TLDR; Group Practice for Deep Reinforcement Learning
Abstract Slides Poster Similar
A Fine-Grained Dataset and Its Efficient Semantic Segmentation for Unstructured Driving Scenarios
Kai Andreas Metzger, Peter Mortimer, Hans J "Joe" Wuensche

Auto-TLDR; TAS500: A Semantic Segmentation Dataset for Autonomous Driving in Unstructured Environments
Abstract Slides Poster Similar
Adaptive Remote Sensing Image Attribute Learning for Active Object Detection
Nuo Xu, Chunlei Huo, Chunhong Pan
Auto-TLDR; Adaptive Image Attribute Learning for Active Object Detection
PolyLaneNet: Lane Estimation Via Deep Polynomial Regression
Talles Torres, Rodrigo Berriel, Thiago Paixão, Claudine Badue, Alberto F. De Souza, Thiago Oliveira-Santos
Auto-TLDR; Real-Time Lane Detection with Deep Polynomial Regression
Abstract Slides Poster Similar
Attention Based Coupled Framework for Road and Pothole Segmentation
Shaik Masihullah, Ritu Garg, Prerana Mukherjee, Anupama Ray

Auto-TLDR; Few Shot Learning for Road and Pothole Segmentation on KITTI and IDD
Abstract Slides Poster Similar
Future Urban Scenes Generation through Vehicles Synthesis
Alessandro Simoni, Luca Bergamini, Andrea Palazzi, Simone Calderara, Rita Cucchiara

Auto-TLDR; Predicting the Future of an Urban Scene with a Novel View Synthesis Paradigm
Abstract Slides Poster Similar
RLST: A Reinforcement Learning Approach to Scene Text Detection Refinement
Xuan Peng, Zheng Huang, Kai Chen, Jie Guo, Weidong Qiu
Auto-TLDR; Saccadic Eye Movements and Peripheral Vision for Scene Text Detection using Reinforcement Learning
Abstract Slides Poster Similar
DeepBEV: A Conditional Adversarial Network for Bird’s Eye View Generation
Auto-TLDR; A Generative Adversarial Network for Semantic Object Representation in Autonomous Vehicles
Abstract Slides Poster Similar
Vehicle Lane Merge Visual Benchmark

Auto-TLDR; A Benchmark for Automated Cooperative Maneuvering Using Multi-view Video Streams and Ground Truth Vehicle Description
Abstract Slides Poster Similar
Quantifying the Use of Domain Randomization
Mohammad Ani, Hector Basevi, Ales Leonardis
Auto-TLDR; Evaluating Domain Randomization for Synthetic Image Generation by directly measuring the difference between realistic and synthetic data distributions
Abstract Slides Poster Similar
SAILenv: Learning in Virtual Visual Environments Made Simple
Enrico Meloni, Luca Pasqualini, Matteo Tiezzi, Marco Gori, Stefano Melacci

Auto-TLDR; SAILenv: A Simple and Customized Platform for Visual Recognition in Virtual 3D Environment
Abstract Slides Poster Similar
Improving Visual Question Answering Using Active Perception on Static Images
Theodoros Bozinis, Nikolaos Passalis, Anastasios Tefas
Auto-TLDR; Fine-Grained Visual Question Answering with Reinforcement Learning-based Active Perception
Abstract Slides Poster Similar
Visual Localization for Autonomous Driving: Mapping the Accurate Location in the City Maze
Dongfang Liu, Yiming Cui, Xiaolei Guo, Wei Ding, Baijian Yang, Yingjie Chen

Auto-TLDR; Feature Voting for Robust Visual Localization in Urban Settings
Abstract Slides Poster Similar
Single-Modal Incremental Terrain Clustering from Self-Supervised Audio-Visual Feature Learning
Reina Ishikawa, Ryo Hachiuma, Akiyoshi Kurobe, Hideo Saito
Auto-TLDR; Multi-modal Variational Autoencoder for Terrain Type Clustering
Abstract Slides Poster Similar
Image Sequence Based Cyclist Action Recognition Using Multi-Stream 3D Convolution
Stefan Zernetsch, Steven Schreck, Viktor Kress, Konrad Doll, Bernhard Sick

Auto-TLDR; 3D-ConvNet: A Multi-stream 3D Convolutional Neural Network for Detecting Cyclists in Real World Traffic Situations
Abstract Slides Poster Similar
RONELD: Robust Neural Network Output Enhancement for Active Lane Detection
Zhe Ming Chng, Joseph Mun Hung Lew, Jimmy Addison Lee

Auto-TLDR; Real-Time Robust Neural Network Output Enhancement for Active Lane Detection
Abstract Slides Poster Similar
Street-Map Based Validation of Semantic Segmentation in Autonomous Driving
Laura Von Rueden, Tim Wirtz, Fabian Hueger, Jan David Schneider, Nico Piatkowski, Christian Bauckhage

Auto-TLDR; Semantic Segmentation Mask Validation Using A-priori Knowledge from Street Maps
Abstract Slides Poster Similar
DAG-Net: Double Attentive Graph Neural Network for Trajectory Forecasting
Alessio Monti, Alessia Bertugli, Simone Calderara, Rita Cucchiara
Auto-TLDR; Recurrent Generative Model for Multi-modal Human Motion Behaviour in Urban Environments
Abstract Slides Poster Similar
AV-SLAM: Autonomous Vehicle SLAM with Gravity Direction Initialization
Kaan Yilmaz, Baris Suslu, Sohini Roychowdhury, L. Srikar Muppirisetty

Auto-TLDR; VI-SLAM with AGI: A combination of three SLAM algorithms for autonomous vehicles
Abstract Slides Poster Similar
Temporal Pulses Driven Spiking Neural Network for Time and Power Efficient Object Recognition in Autonomous Driving
Wei Wang, Shibo Zhou, Jingxi Li, Xiaohua Li, Junsong Yuan, Zhanpeng Jin

Auto-TLDR; Spiking Neural Network for Real-Time Object Recognition on Temporal LiDAR Pulses
Abstract Slides Poster Similar
Towards life-long mapping of dynamic environments using temporal persistence modeling
Georgios Tsamis, Ioannis Kostavelis, Dimitrios Giakoumis, Dimitrios Tzovaras
Auto-TLDR; Lifelong Mapping for Mobile Robot Navigation in Dynamic Environments
Abstract Slides Poster Similar
P2D: A Self-Supervised Method for Depth Estimation from Polarimetry
Marc Blanchon, Desire Sidibe, Olivier Morel, Ralph Seulin, Daniel Braun, Fabrice Meriaudeau

Auto-TLDR; Polarimetric Regularization for Monocular Depth Estimation
Abstract Slides Poster Similar
Map-Based Temporally Consistent Geolocalization through Learning Motion Trajectories

Auto-TLDR; Exploiting Motion Trajectories for Geolocalization of Object on Topological Map using Recurrent Neural Network
Abstract Slides Poster Similar