Towards life-long mapping of dynamic environments using temporal persistence modeling
Georgios Tsamis,
Ioannis Kostavelis,
Dimitrios Giakoumis,
Dimitrios Tzovaras
Auto-TLDR; Lifelong Mapping for Mobile Robot Navigation in Dynamic Environments
Similar papers
Map-Based Temporally Consistent Geolocalization through Learning Motion Trajectories

Auto-TLDR; Exploiting Motion Trajectories for Geolocalization of Object on Topological Map using Recurrent Neural Network
Abstract Slides Poster Similar
Deep Next-Best-View Planner for Cross-Season Visual Route Classification
Auto-TLDR; Active Visual Place Recognition using Deep Convolutional Neural Network
Abstract Slides Poster Similar
Benchmarking Cameras for OpenVSLAM Indoors
Kevin Chappellet, Guillaume Caron, Fumio Kanehiro, Ken Sakurada, Abderrahmane Kheddar

Auto-TLDR; OpenVSLAM: Benchmarking Camera Types for Visual Simultaneous Localization and Mapping
Abstract Slides Poster Similar
Object-Oriented Map Exploration and Construction Based on Auxiliary Task Aided DRL
Junzhe Xu, Jianhua Zhang, Shengyong Chen, Honghai Liu

Auto-TLDR; Auxiliary Task Aided Deep Reinforcement Learning for Environment Exploration by Autonomous Robots
RISEdb: A Novel Indoor Localization Dataset
Carlos Sanchez Belenguer, Erik Wolfart, Álvaro Casado Coscollá, Vitor Sequeira

Auto-TLDR; Indoor Localization Using LiDAR SLAM and Smartphones: A Benchmarking Dataset
Abstract Slides Poster Similar
Localization of Unmanned Aerial Vehicles in Corridor Environments Using Deep Learning
Ram Padhy, Shahzad Ahmad, Sachin Verma, Sambit Bakshi, Pankaj Kumar Sa
Auto-TLDR; A monocular vision assisted localization algorithm for indoor corridor environments
Abstract Slides Poster Similar
Learning to Segment Dynamic Objects Using SLAM Outliers
Dupont Romain, Mohamed Tamaazousti, Hervé Le Borgne

Auto-TLDR; Automatic Segmentation of Dynamic Objects Using SLAM Outliers Using Consensus Inversion
Abstract Slides Poster Similar
Low Dimensional State Representation Learning with Reward-Shaped Priors
Nicolò Botteghi, Ruben Obbink, Daan Geijs, Mannes Poel, Beril Sirmacek, Christoph Brune, Abeje Mersha, Stefano Stramigioli

Auto-TLDR; Unsupervised Learning for Unsupervised Reinforcement Learning in Robotics
Multiple Future Prediction Leveraging Synthetic Trajectories
Lorenzo Berlincioni, Federico Becattini, Lorenzo Seidenari, Alberto Del Bimbo

Auto-TLDR; Synthetic Trajectory Prediction using Markov Chains
Abstract Slides Poster Similar
A Bayesian Approach to Reinforcement Learning of Vision-Based Vehicular Control
Zahra Gharaee, Karl Holmquist, Linbo He, Michael Felsberg

Auto-TLDR; Bayesian Reinforcement Learning for Autonomous Driving
Abstract Slides Poster Similar
Generic Merging of Structure from Motion Maps with a Low Memory Footprint
Gabrielle Flood, David Gillsjö, Patrik Persson, Anders Heyden, Kalle Åström

Auto-TLDR; A Low-Memory Footprint Representation for Robust Map Merge
Abstract Slides Poster Similar
Visual Prediction of Driver Behavior in Shared Road Areas
Peter Gawronski, Darius Burschka
Auto-TLDR; Predicting Vehicle Behavior in Shared Road Segment Intersections Using Topological Knowledge
Abstract Slides Poster Similar
On Embodied Visual Navigation in Real Environments through Habitat
Marco Rosano, Antonino Furnari, Luigi Gulino, Giovanni Maria Farinella

Auto-TLDR; Learning Navigation Policies on Real World Observations using Real World Images and Sensor and Actuation Noise
Abstract Slides Poster Similar
Holistic Grid Fusion Based Stop Line Estimation
Runsheng Xu, Faezeh Tafazzoli, Li Zhang, Timo Rehfeld, Gunther Krehl, Arunava Seal

Auto-TLDR; Fused Multi-Sensory Data for Stop Lines Detection in Intersection Scenarios
Expectation-Maximization for Scheduling Problems in Satellite Communication
Werner Bailer, Martin Winter, Johannes Ebert, Joel Flavio, Karin Plimon
Auto-TLDR; Unsupervised Machine Learning for Satellite Communication Using Expectation-Maximization
Abstract Slides Poster Similar
Deep Reinforcement Learning on a Budget: 3D Control and Reasoning without a Supercomputer
Edward Beeching, Jilles Steeve Dibangoye, Olivier Simonin, Christian Wolf
Auto-TLDR; Deep Reinforcement Learning in Mobile Robots Using 3D Environment Scenarios
Abstract Slides Poster Similar
DAG-Net: Double Attentive Graph Neural Network for Trajectory Forecasting
Alessio Monti, Alessia Bertugli, Simone Calderara, Rita Cucchiara
Auto-TLDR; Recurrent Generative Model for Multi-modal Human Motion Behaviour in Urban Environments
Abstract Slides Poster Similar
Surface Material Dataset for Robotics Applications (SMDRA): A Dataset with Friction Coefficient and RGB-D for Surface Segmentation
Donghun Noh, Hyunwoo Nam, Min Sung Ahn, Hosik Chae, Sangjoon Lee, Kyle Gillespie, Dennis Hong
Auto-TLDR; A Surface Material Dataset for Robotics Applications
Abstract Slides Poster Similar
Vehicle Lane Merge Visual Benchmark

Auto-TLDR; A Benchmark for Automated Cooperative Maneuvering Using Multi-view Video Streams and Ground Truth Vehicle Description
Abstract Slides Poster Similar
AV-SLAM: Autonomous Vehicle SLAM with Gravity Direction Initialization
Kaan Yilmaz, Baris Suslu, Sohini Roychowdhury, L. Srikar Muppirisetty

Auto-TLDR; VI-SLAM with AGI: A combination of three SLAM algorithms for autonomous vehicles
Abstract Slides Poster Similar
SAILenv: Learning in Virtual Visual Environments Made Simple
Enrico Meloni, Luca Pasqualini, Matteo Tiezzi, Marco Gori, Stefano Melacci

Auto-TLDR; SAILenv: A Simple and Customized Platform for Visual Recognition in Virtual 3D Environment
Abstract Slides Poster Similar
Story Comparison for Estimating Field of View Overlap in a Video Collection
Thierry Malon, Sylvie Chambon, Alain Crouzil, Vincent Charvillat
Auto-TLDR; Finding Videos with Overlapping Fields of View Using Video Data
Improving Robotic Grasping on Monocular Images Via Multi-Task Learning and Positional Loss
William Prew, Toby Breckon, Magnus Bordewich, Ulrik Beierholm

Auto-TLDR; Improving grasping performance from monocularcolour images in an end-to-end CNN architecture with multi-task learning
Abstract Slides Poster Similar
Object Segmentation Tracking from Generic Video Cues
Amirhossein Kardoost, Sabine Müller, Joachim Weickert, Margret Keuper

Auto-TLDR; A Light-Weight Variational Framework for Video Object Segmentation in Videos
Abstract Slides Poster Similar
Edge-Aware Monocular Dense Depth Estimation with Morphology
Zhi Li, Xiaoyang Zhu, Haitao Yu, Qi Zhang, Yongshi Jiang

Auto-TLDR; Spatio-Temporally Smooth Dense Depth Maps Using Only a CPU
Abstract Slides Poster Similar
Attention Based Coupled Framework for Road and Pothole Segmentation
Shaik Masihullah, Ritu Garg, Prerana Mukherjee, Anupama Ray

Auto-TLDR; Few Shot Learning for Road and Pothole Segmentation on KITTI and IDD
Abstract Slides Poster Similar
Loop-closure detection by LiDAR scan re-identification
Jukka Peltomäki, Xingyang Ni, Jussi Puura, Joni-Kristian Kamarainen, Heikki Juhani Huttunen

Auto-TLDR; Loop-Closing Detection from LiDAR Scans Using Convolutional Neural Networks
Abstract Slides Poster Similar
One Step Clustering Based on A-Contrario Framework for Detection of Alterations in Historical Violins
Alireza Rezaei, Sylvie Le Hégarat-Mascle, Emanuel Aldea, Piercarlo Dondi, Marco Malagodi

Auto-TLDR; A-Contrario Clustering for the Detection of Altered Violins using UVIFL Images
Abstract Slides Poster Similar
Real-Time End-To-End Lane ID Estimation Using Recurrent Networks
Ibrahim Halfaoui, Fahd Bouzaraa, Onay Urfalioglu

Auto-TLDR; Real-Time, Vision-Only Lane Identification Using Monocular Camera
Abstract Slides Poster Similar
Self-Supervised Detection and Pose Estimation of Logistical Objects in 3D Sensor Data
Nikolas Müller, Jonas Stenzel, Jian-Jia Chen

Auto-TLDR; A self-supervised and fully automated deep learning approach for object pose estimation using simulated 3D data
Abstract Slides Poster Similar
Visual Localization for Autonomous Driving: Mapping the Accurate Location in the City Maze
Dongfang Liu, Yiming Cui, Xiaolei Guo, Wei Ding, Baijian Yang, Yingjie Chen

Auto-TLDR; Feature Voting for Robust Visual Localization in Urban Settings
Abstract Slides Poster Similar
Transformer Networks for Trajectory Forecasting
Francesco Giuliari, Hasan Irtiza, Marco Cristani, Fabio Galasso
Auto-TLDR; TransformerNetworks for Trajectory Prediction of People Interactions
Abstract Slides Poster Similar
A Plane-Based Approach for Indoor Point Clouds Registration
Ketty Favre, Muriel Pressigout, Luce Morin, Eric Marchand

Auto-TLDR; A plane-based registration approach for indoor environments based on LiDAR data
Abstract Slides Poster Similar
P2D: A Self-Supervised Method for Depth Estimation from Polarimetry
Marc Blanchon, Desire Sidibe, Olivier Morel, Ralph Seulin, Daniel Braun, Fabrice Meriaudeau

Auto-TLDR; Polarimetric Regularization for Monocular Depth Estimation
Abstract Slides Poster Similar
Dynamic Resource-Aware Corner Detection for Bio-Inspired Vision Sensors
Sherif Abdelmonem Sayed Mohamed, Jawad Yasin, Mohammad-Hashem Haghbayan, Antonio Miele, Jukka Veikko Heikkonen, Hannu Tenhunen, Juha Plosila
Auto-TLDR; Three Layer Filtering-Harris Algorithm for Event-based Cameras in Real-Time
Learning from Learners: Adapting Reinforcement Learning Agents to Be Competitive in a Card Game
Pablo Vinicius Alves De Barros, Ana Tanevska, Alessandra Sciutti
Auto-TLDR; Adaptive Reinforcement Learning for Competitive Card Games
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
A Two-Step Approach to Lidar-Camera Calibration
Yingna Su, Yaqing Ding, Jian Yang, Hui Kong

Auto-TLDR; Closed-Form Calibration of Lidar-camera System for Ego-motion Estimation and Scene Understanding
Abstract Slides Poster Similar
Single-Modal Incremental Terrain Clustering from Self-Supervised Audio-Visual Feature Learning
Reina Ishikawa, Ryo Hachiuma, Akiyoshi Kurobe, Hideo Saito
Auto-TLDR; Multi-modal Variational Autoencoder for Terrain Type Clustering
Abstract Slides Poster Similar
Location Prediction in Real Homes of Older Adults based on K-Means in Low-Resolution Depth Videos
Simon Simonsson, Flávia Dias Casagrande, Evi Zouganeli
Auto-TLDR; Semi-supervised Learning for Location Recognition and Prediction in Smart Homes using Depth Video Cameras
Abstract Slides Poster Similar
Total Estimation from RGB Video: On-Line Camera Self-Calibration, Non-Rigid Shape and Motion

Auto-TLDR; Joint Auto-Calibration, Pose and 3D Reconstruction of a Non-rigid Object from an uncalibrated RGB Image Sequence
Abstract Slides Poster Similar
Explore and Explain: Self-Supervised Navigation and Recounting
Roberto Bigazzi, Federico Landi, Marcella Cornia, Silvia Cascianelli, Lorenzo Baraldi, Rita Cucchiara
Auto-TLDR; Exploring a Photorealistic Environment for Explanation and Navigation
Multimodal End-To-End Learning for Autonomous Steering in Adverse Road and Weather Conditions
Jyri Sakari Maanpää, Josef Taher, Petri Manninen, Leo Pakola, Iaroslav Melekhov, Juha Hyyppä

Auto-TLDR; End-to-End Learning for Autonomous Steering in Adverse Road and Weather Conditions with Lidar Data
Abstract Slides Poster Similar
AG-GAN: An Attentive Group-Aware GAN for Pedestrian Trajectory Prediction
Yue Song, Niccolò Bisagno, Syed Zohaib Hassan, Nicola Conci
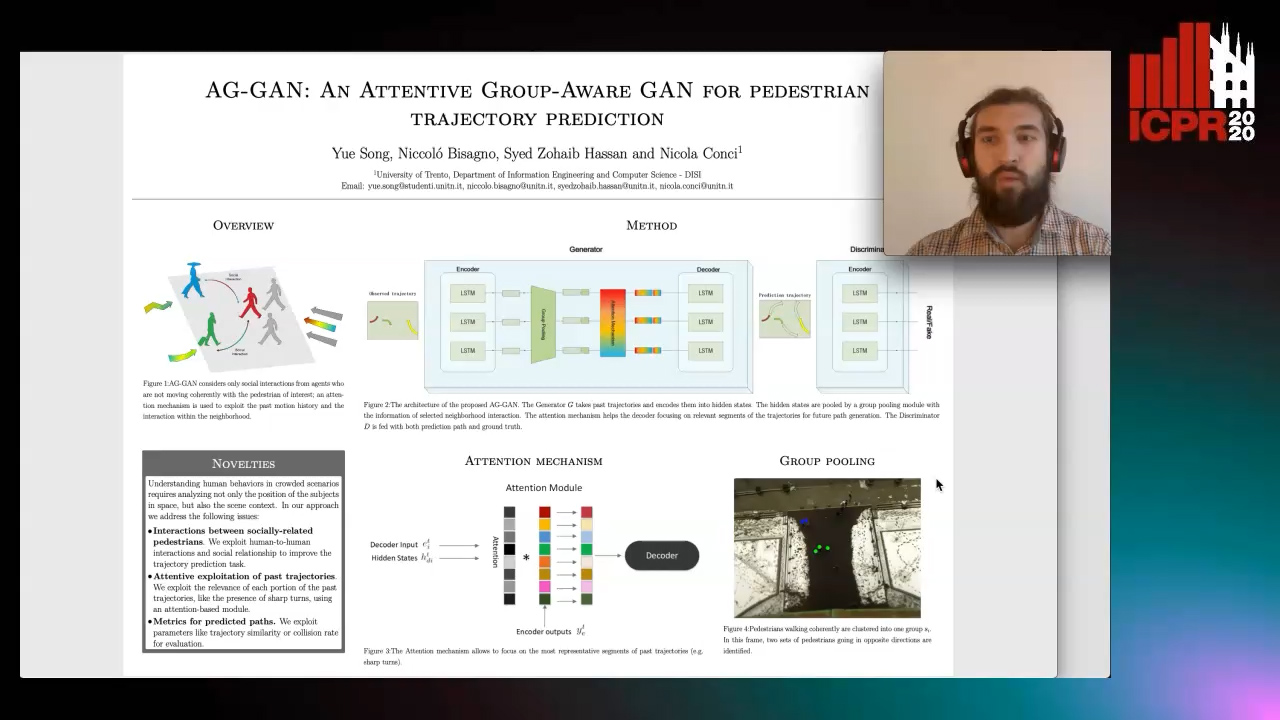
Auto-TLDR; An attentive group-aware GAN for motion prediction in crowded scenarios
Abstract Slides Poster Similar
OmniFlowNet: A Perspective Neural Network Adaptation for Optical Flow Estimation in Omnidirectional Images
Charles-Olivier Artizzu, Haozhou Zhang, Guillaume Allibert, Cédric Demonceaux

Auto-TLDR; OmniFlowNet: A Convolutional Neural Network for Omnidirectional Optical Flow Estimation
Abstract Slides Poster Similar
A Fine-Grained Dataset and Its Efficient Semantic Segmentation for Unstructured Driving Scenarios
Kai Andreas Metzger, Peter Mortimer, Hans J "Joe" Wuensche

Auto-TLDR; TAS500: A Semantic Segmentation Dataset for Autonomous Driving in Unstructured Environments
Abstract Slides Poster Similar
Developing Motion Code Embedding for Action Recognition in Videos
Maxat Alibayev, David Andrea Paulius, Yu Sun
Auto-TLDR; Motion Embedding via Motion Codes for Action Recognition
Abstract Slides Poster Similar
Temporal Pulses Driven Spiking Neural Network for Time and Power Efficient Object Recognition in Autonomous Driving
Wei Wang, Shibo Zhou, Jingxi Li, Xiaohua Li, Junsong Yuan, Zhanpeng Jin

Auto-TLDR; Spiking Neural Network for Real-Time Object Recognition on Temporal LiDAR Pulses
Abstract Slides Poster Similar