AV-SLAM: Autonomous Vehicle SLAM with Gravity Direction Initialization
Kaan Yilmaz,
Baris Suslu,
Sohini Roychowdhury,
L. Srikar Muppirisetty

Auto-TLDR; VI-SLAM with AGI: A combination of three SLAM algorithms for autonomous vehicles
Similar papers
Benchmarking Cameras for OpenVSLAM Indoors
Kevin Chappellet, Guillaume Caron, Fumio Kanehiro, Ken Sakurada, Abderrahmane Kheddar

Auto-TLDR; OpenVSLAM: Benchmarking Camera Types for Visual Simultaneous Localization and Mapping
Abstract Slides Poster Similar
RISEdb: A Novel Indoor Localization Dataset
Carlos Sanchez Belenguer, Erik Wolfart, Álvaro Casado Coscollá, Vitor Sequeira

Auto-TLDR; Indoor Localization Using LiDAR SLAM and Smartphones: A Benchmarking Dataset
Abstract Slides Poster Similar
A Two-Step Approach to Lidar-Camera Calibration
Yingna Su, Yaqing Ding, Jian Yang, Hui Kong

Auto-TLDR; Closed-Form Calibration of Lidar-camera System for Ego-motion Estimation and Scene Understanding
Abstract Slides Poster Similar
NetCalib: A Novel Approach for LiDAR-Camera Auto-Calibration Based on Deep Learning
Shan Wu, Amnir Hadachi, Damien Vivet, Yadu Prabhakar

Auto-TLDR; Automatic Calibration of LiDAR and Cameras using Deep Neural Network
Abstract Slides Poster Similar
Better Prior Knowledge Improves Human-Pose-Based Extrinsic Camera Calibration
Olivier Moliner, Sangxia Huang, Kalle Åström

Auto-TLDR; Improving Human-pose-based Extrinsic Calibration for Multi-Camera Systems
Abstract Slides Poster Similar
Generic Merging of Structure from Motion Maps with a Low Memory Footprint
Gabrielle Flood, David Gillsjö, Patrik Persson, Anders Heyden, Kalle Åström

Auto-TLDR; A Low-Memory Footprint Representation for Robust Map Merge
Abstract Slides Poster Similar
Rotational Adjoint Methods for Learning-Free 3D Human Pose Estimation from IMU Data
Caterina Emilia Agelide Buizza, Yiannis Demiris

Auto-TLDR; Learning-free 3D Human Pose Estimation from Inertial Measurement Unit Data
Learning to Segment Dynamic Objects Using SLAM Outliers
Dupont Romain, Mohamed Tamaazousti, Hervé Le Borgne

Auto-TLDR; Automatic Segmentation of Dynamic Objects Using SLAM Outliers Using Consensus Inversion
Abstract Slides Poster Similar
Map-Based Temporally Consistent Geolocalization through Learning Motion Trajectories

Auto-TLDR; Exploiting Motion Trajectories for Geolocalization of Object on Topological Map using Recurrent Neural Network
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Total Estimation from RGB Video: On-Line Camera Self-Calibration, Non-Rigid Shape and Motion

Auto-TLDR; Joint Auto-Calibration, Pose and 3D Reconstruction of a Non-rigid Object from an uncalibrated RGB Image Sequence
Abstract Slides Poster Similar
Camera Calibration Using Parallel Line Segments

Auto-TLDR; Closed-Form Calibration of Surveillance Cameras using Parallel 3D Line Segment Projections
Abstract Slides Poster Similar
A Plane-Based Approach for Indoor Point Clouds Registration
Ketty Favre, Muriel Pressigout, Luce Morin, Eric Marchand

Auto-TLDR; A plane-based registration approach for indoor environments based on LiDAR data
Abstract Slides Poster Similar
P2D: A Self-Supervised Method for Depth Estimation from Polarimetry
Marc Blanchon, Desire Sidibe, Olivier Morel, Ralph Seulin, Daniel Braun, Fabrice Meriaudeau

Auto-TLDR; Polarimetric Regularization for Monocular Depth Estimation
Abstract Slides Poster Similar
Edge-Aware Monocular Dense Depth Estimation with Morphology
Zhi Li, Xiaoyang Zhu, Haitao Yu, Qi Zhang, Yongshi Jiang

Auto-TLDR; Spatio-Temporally Smooth Dense Depth Maps Using Only a CPU
Abstract Slides Poster Similar
Calibration and Absolute Pose Estimation of Trinocular Linear Camera Array for Smart City Applications
Martin Ahrnbom, Mikael Nilsson, Håkan Ardö, Kalle Åström, Oksana Yastremska-Kravchenko, Aliaksei Laureshyn

Auto-TLDR; Trinocular Linear Camera Array Calibration for Traffic Surveillance Applications
Abstract Slides Poster Similar
Multiple Future Prediction Leveraging Synthetic Trajectories
Lorenzo Berlincioni, Federico Becattini, Lorenzo Seidenari, Alberto Del Bimbo

Auto-TLDR; Synthetic Trajectory Prediction using Markov Chains
Abstract Slides Poster Similar
Vehicle Lane Merge Visual Benchmark

Auto-TLDR; A Benchmark for Automated Cooperative Maneuvering Using Multi-view Video Streams and Ground Truth Vehicle Description
Abstract Slides Poster Similar
Localization of Unmanned Aerial Vehicles in Corridor Environments Using Deep Learning
Ram Padhy, Shahzad Ahmad, Sachin Verma, Sambit Bakshi, Pankaj Kumar Sa
Auto-TLDR; A monocular vision assisted localization algorithm for indoor corridor environments
Abstract Slides Poster Similar
Unconstrained Vision Guided UAV Based Safe Helicopter Landing
Arindam Sikdar, Abhimanyu Sahu, Debajit Sen, Rohit Mahajan, Ananda Chowdhury

Auto-TLDR; Autonomous Helicopter Landing in Hazardous Environments from Unmanned Aerial Images Using Constrained Graph Clustering
Abstract Slides Poster Similar
Minimal Solvers for Indoor UAV Positioning
Marcus Valtonen Örnhag, Patrik Persson, Mårten Wadenbäck, Kalle Åström, Anders Heyden

Auto-TLDR; Relative Pose Solvers for Visual Indoor UAV Navigation
Abstract Slides Poster Similar
Object-Oriented Map Exploration and Construction Based on Auxiliary Task Aided DRL
Junzhe Xu, Jianhua Zhang, Shengyong Chen, Honghai Liu

Auto-TLDR; Auxiliary Task Aided Deep Reinforcement Learning for Environment Exploration by Autonomous Robots
Two-Stage Adaptive Object Scene Flow Using Hybrid CNN-CRF Model
Congcong Li, Haoyu Ma, Qingmin Liao

Auto-TLDR; Adaptive object scene flow estimation using a hybrid CNN-CRF model and adaptive iteration
Abstract Slides Poster Similar
A Bayesian Approach to Reinforcement Learning of Vision-Based Vehicular Control
Zahra Gharaee, Karl Holmquist, Linbo He, Michael Felsberg

Auto-TLDR; Bayesian Reinforcement Learning for Autonomous Driving
Abstract Slides Poster Similar
Holistic Grid Fusion Based Stop Line Estimation
Runsheng Xu, Faezeh Tafazzoli, Li Zhang, Timo Rehfeld, Gunther Krehl, Arunava Seal

Auto-TLDR; Fused Multi-Sensory Data for Stop Lines Detection in Intersection Scenarios
Can You Trust Your Pose? Confidence Estimation in Visual Localization
Luca Ferranti, Xiaotian Li, Jani Boutellier, Juho Kannala

Auto-TLDR; Pose Confidence Estimation in Large-Scale Environments: A Light-weight Approach to Improving Pose Estimation Pipeline
Abstract Slides Poster Similar
HPERL: 3D Human Pose Estimastion from RGB and LiDAR
Michael Fürst, Shriya T.P. Gupta, René Schuster, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; 3D Human Pose Estimation Using RGB and LiDAR Using Weakly-Supervised Approach
Abstract Slides Poster Similar
Movement-Induced Priors for Deep Stereo
Yuxin Hou, Muhammad Kamran Janjua, Juho Kannala, Arno Solin

Auto-TLDR; Fusing Stereo Disparity Estimation with Movement-induced Prior Information
Abstract Slides Poster Similar
Real-Time End-To-End Lane ID Estimation Using Recurrent Networks
Ibrahim Halfaoui, Fahd Bouzaraa, Onay Urfalioglu

Auto-TLDR; Real-Time, Vision-Only Lane Identification Using Monocular Camera
Abstract Slides Poster Similar
Attention Based Coupled Framework for Road and Pothole Segmentation
Shaik Masihullah, Ritu Garg, Prerana Mukherjee, Anupama Ray

Auto-TLDR; Few Shot Learning for Road and Pothole Segmentation on KITTI and IDD
Abstract Slides Poster Similar
CARRADA Dataset: Camera and Automotive Radar with Range-Angle-Doppler Annotations
Arthur Ouaknine, Alasdair Newson, Julien Rebut, Florence Tupin, Patrick Pérez

Auto-TLDR; CARRADA: A dataset of synchronized camera and radar recordings with range-angle-Doppler annotations for autonomous driving
Abstract Slides Poster Similar
RefiNet: 3D Human Pose Refinement with Depth Maps
Andrea D'Eusanio, Stefano Pini, Guido Borghi, Roberto Vezzani, Rita Cucchiara

Auto-TLDR; RefiNet: A Multi-stage Framework for 3D Human Pose Estimation
Partially Supervised Multi-Task Network for Single-View Dietary Assessment
Ya Lu, Thomai Stathopoulou, Stavroula Mougiakakou

Auto-TLDR; Food Volume Estimation from a Single Food Image via Geometric Understanding and Semantic Prediction
Abstract Slides Poster Similar
Dynamic Resource-Aware Corner Detection for Bio-Inspired Vision Sensors
Sherif Abdelmonem Sayed Mohamed, Jawad Yasin, Mohammad-Hashem Haghbayan, Antonio Miele, Jukka Veikko Heikkonen, Hannu Tenhunen, Juha Plosila
Auto-TLDR; Three Layer Filtering-Harris Algorithm for Event-based Cameras in Real-Time
Hybrid Approach for 3D Head Reconstruction: Using Neural Networks and Visual Geometry
Oussema Bouafif, Bogdan Khomutenko, Mohammed Daoudi

Auto-TLDR; Recovering 3D Head Geometry from a Single Image using Deep Learning and Geometric Techniques
Abstract Slides Poster Similar
Loop-closure detection by LiDAR scan re-identification
Jukka Peltomäki, Xingyang Ni, Jussi Puura, Joni-Kristian Kamarainen, Heikki Juhani Huttunen

Auto-TLDR; Loop-Closing Detection from LiDAR Scans Using Convolutional Neural Networks
Abstract Slides Poster Similar
Ghost Target Detection in 3D Radar Data Using Point Cloud Based Deep Neural Network
Mahdi Chamseddine, Jason Rambach, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; Point Based Deep Learning for Ghost Target Detection in 3D Radar Point Clouds
Abstract Slides Poster Similar
A Globally Optimal Method for the PnP Problem with MRP Rotation Parameterization
Manolis Lourakis, George Terzakis
Auto-TLDR; A Direct least squares, algebraic PnP solver with modified Rodrigues parameters
Inner Eye Canthus Localization for Human Body Temperature Screening
Claudio Ferrari, Lorenzo Berlincioni, Marco Bertini, Alberto Del Bimbo
Auto-TLDR; Automatic Localization of the Inner Eye Canthus in Thermal Face Images using 3D Morphable Face Model
Abstract Slides Poster Similar
Visual Prediction of Driver Behavior in Shared Road Areas
Peter Gawronski, Darius Burschka
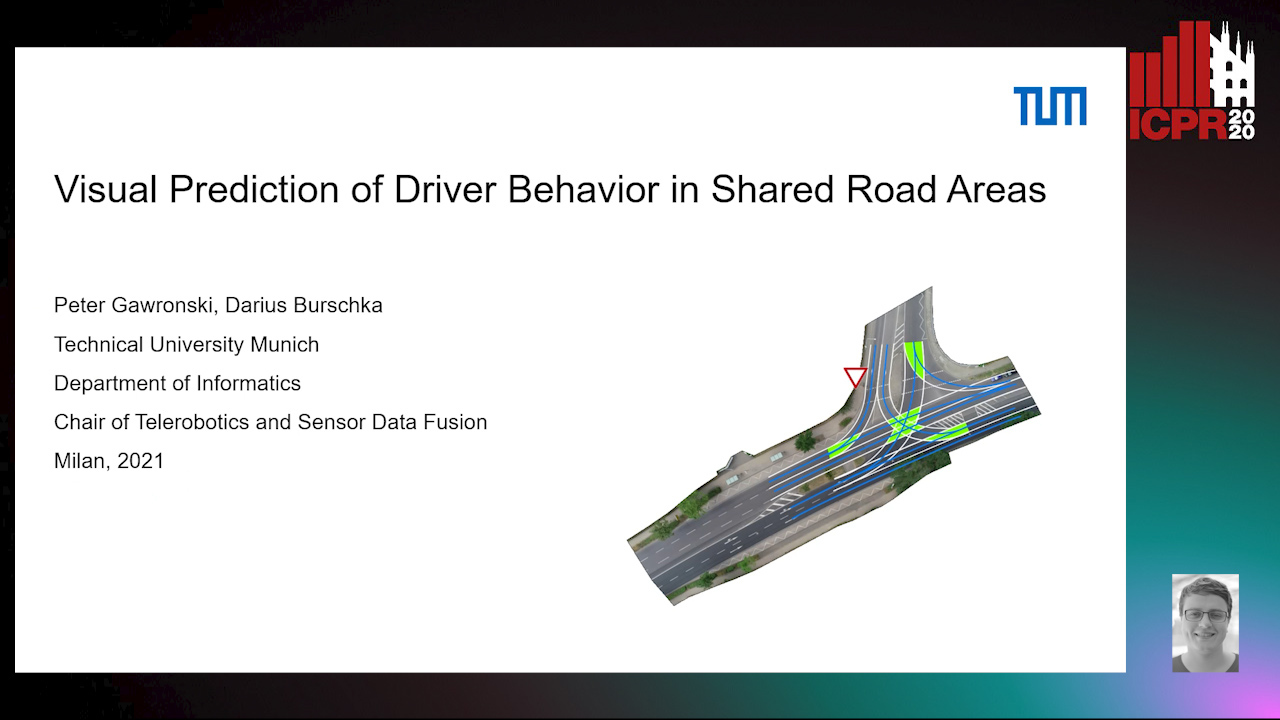
Auto-TLDR; Predicting Vehicle Behavior in Shared Road Segment Intersections Using Topological Knowledge
Abstract Slides Poster Similar
Mobile Augmented Reality: Fast, Precise, and Smooth Planar Object Tracking
Dmitrii Matveichev, Daw-Tung Lin

Auto-TLDR; Planar Object Tracking with Sparse Optical Flow Tracking and Descriptor Matching
Abstract Slides Poster Similar
Self-Supervised Detection and Pose Estimation of Logistical Objects in 3D Sensor Data
Nikolas Müller, Jonas Stenzel, Jian-Jia Chen

Auto-TLDR; A self-supervised and fully automated deep learning approach for object pose estimation using simulated 3D data
Abstract Slides Poster Similar
Towards life-long mapping of dynamic environments using temporal persistence modeling
Georgios Tsamis, Ioannis Kostavelis, Dimitrios Giakoumis, Dimitrios Tzovaras
Auto-TLDR; Lifelong Mapping for Mobile Robot Navigation in Dynamic Environments
Abstract Slides Poster Similar
Air-Writing with Sparse Network of Radars Using Spatio-Temporal Learning
Muhammad Arsalan, Avik Santra, Kay Bierzynski, Vadim Issakov
Auto-TLDR; An Air-writing System for Sparse Radars using Deep Convolutional Neural Networks
Abstract Slides Poster Similar
Motion Segmentation with Pairwise Matches and Unknown Number of Motions
Federica Arrigoni, Tomas Pajdla, Luca Magri

Auto-TLDR; Motion Segmentation using Multi-Modelfitting andpermutation synchronization
Abstract Slides Poster Similar
Deep Next-Best-View Planner for Cross-Season Visual Route Classification
Auto-TLDR; Active Visual Place Recognition using Deep Convolutional Neural Network
Abstract Slides Poster Similar
Future Urban Scenes Generation through Vehicles Synthesis
Alessandro Simoni, Luca Bergamini, Andrea Palazzi, Simone Calderara, Rita Cucchiara

Auto-TLDR; Predicting the Future of an Urban Scene with a Novel View Synthesis Paradigm
Abstract Slides Poster Similar
Effective Deployment of CNNs for 3DoF Pose Estimation and Grasping in Industrial Settings
Daniele De Gregorio, Riccardo Zanella, Gianluca Palli, Luigi Di Stefano

Auto-TLDR; Automated Deep Learning for Robotic Grasping Applications
Abstract Slides Poster Similar