The Effect of Multi-Step Methods on Overestimation in Deep Reinforcement Learning
Lingheng Meng,
Rob Gorbet,
Dana Kulić
Auto-TLDR; Multi-Step DDPG for Deep Reinforcement Learning
Similar papers
A Bayesian Approach to Reinforcement Learning of Vision-Based Vehicular Control
Zahra Gharaee, Karl Holmquist, Linbo He, Michael Felsberg

Auto-TLDR; Bayesian Reinforcement Learning for Autonomous Driving
Abstract Slides Poster Similar
Learning from Learners: Adapting Reinforcement Learning Agents to Be Competitive in a Card Game
Pablo Vinicius Alves De Barros, Ana Tanevska, Alessandra Sciutti
Auto-TLDR; Adaptive Reinforcement Learning for Competitive Card Games
Abstract Slides Poster Similar
AVD-Net: Attention Value Decomposition Network for Deep Multi-Agent Reinforcement Learning
Zhang Yuanxin, Huimin Ma, Yu Wang
Auto-TLDR; Attention Value Decomposition Network for Cooperative Multi-agent Reinforcement Learning
Abstract Slides Poster Similar
Deep Reinforcement Learning on a Budget: 3D Control and Reasoning without a Supercomputer
Edward Beeching, Jilles Steeve Dibangoye, Olivier Simonin, Christian Wolf
Auto-TLDR; Deep Reinforcement Learning in Mobile Robots Using 3D Environment Scenarios
Abstract Slides Poster Similar
Low Dimensional State Representation Learning with Reward-Shaped Priors
Nicolò Botteghi, Ruben Obbink, Daan Geijs, Mannes Poel, Beril Sirmacek, Christoph Brune, Abeje Mersha, Stefano Stramigioli

Auto-TLDR; Unsupervised Learning for Unsupervised Reinforcement Learning in Robotics
Meta Learning Via Learned Loss
Sarah Bechtle, Artem Molchanov, Yevgen Chebotar, Edward Thomas Grefenstette, Ludovic Righetti, Gaurav Sukhatme, Franziska Meier
Auto-TLDR; meta-learning for learning parametric loss functions that generalize across different tasks and model architectures
Object-Oriented Map Exploration and Construction Based on Auxiliary Task Aided DRL
Junzhe Xu, Jianhua Zhang, Shengyong Chen, Honghai Liu

Auto-TLDR; Auxiliary Task Aided Deep Reinforcement Learning for Environment Exploration by Autonomous Robots
Can Reinforcement Learning Lead to Healthy Life?: Simulation Study Based on User Activity Logs
Masami Takahashi, Masahiro Kohjima, Takeshi Kurashima, Hiroyuki Toda
Auto-TLDR; Reinforcement Learning for Healthy Daily Life
Abstract Slides Poster Similar
Detecting and Adapting to Crisis Pattern with Context Based Deep Reinforcement Learning
Eric Benhamou, David Saltiel Saltiel, Jean-Jacques Ohana Ohana, Jamal Atif Atif

Auto-TLDR; Deep Reinforcement Learning for Financial Crisis Detection and Dis-Investment
Abstract Slides Poster Similar
Self-Play or Group Practice: Learning to Play Alternating Markov Game in Multi-Agent System
Chin-Wing Leung, Shuyue Hu, Ho-Fung Leung
Auto-TLDR; Group Practice for Deep Reinforcement Learning
Abstract Slides Poster Similar
Deep Reinforcement Learning for Autonomous Driving by Transferring Visual Features
Hongli Zhou, Guanwen Zhang, Wei Zhou
Auto-TLDR; Deep Reinforcement Learning for Autonomous Driving by Transferring Visual Features
Abstract Slides Poster Similar
Trajectory Representation Learning for Multi-Task NMRDP Planning
Firas Jarboui, Vianney Perchet
Auto-TLDR; Exploring Non Markovian Reward Decision Processes for Reinforcement Learning
Abstract Slides Poster Similar
AOAM: Automatic Optimization of Adjacency Matrix for Graph Convolutional Network
Yuhang Zhang, Hongshuai Ren, Jiexia Ye, Xitong Gao, Yang Wang, Kejiang Ye, Cheng-Zhong Xu
Auto-TLDR; Adjacency Matrix for Graph Convolutional Network in Non-Euclidean Space
Abstract Slides Poster Similar
Vacant Parking Space Detection Based on Task Consistency and Reinforcement Learning
Manh Hung Nguyen, Tzu-Yin Chao, Ching-Chun Huang
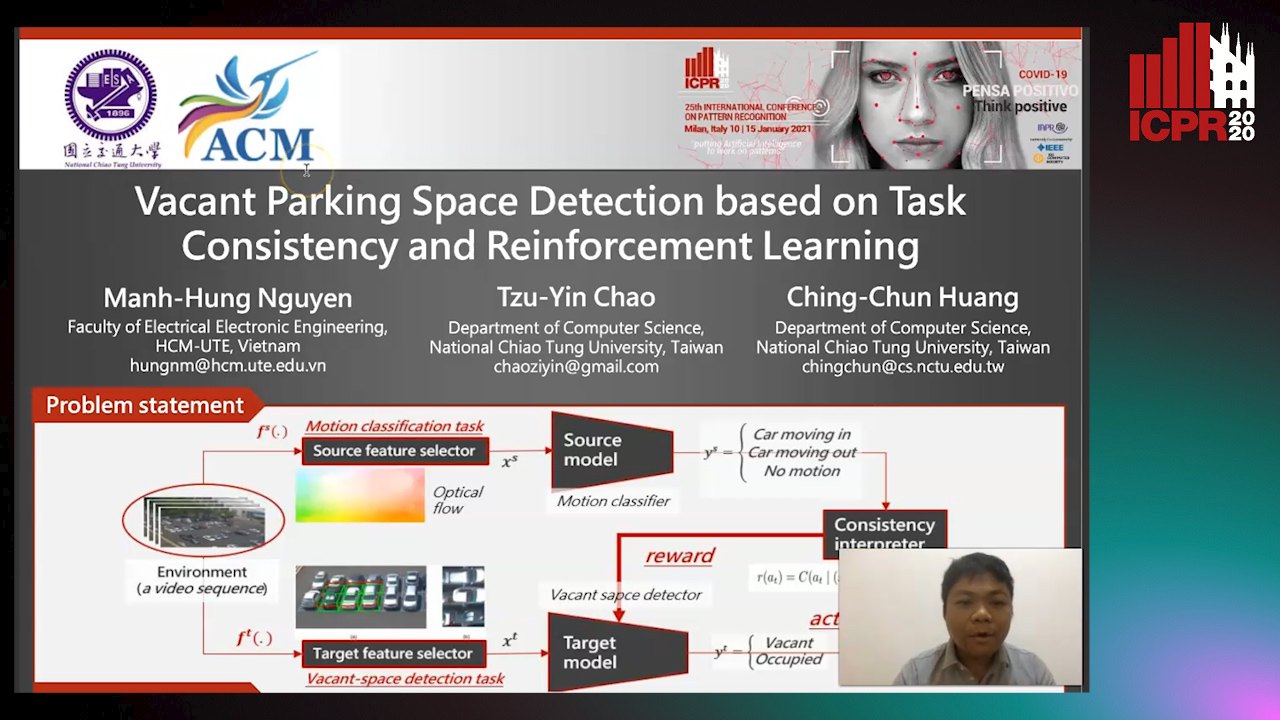
Auto-TLDR; Vacant Space Detection via Semantic Consistency Learning
Abstract Slides Poster Similar
Rethinking Experience Replay: A Bag of Tricks for Continual Learning
Pietro Buzzega, Matteo Boschini, Angelo Porrello, Simone Calderara
Auto-TLDR; Experience Replay for Continual Learning: A Practical Approach
Abstract Slides Poster Similar
A Novel Actor Dual-Critic Model for Remote Sensing Image Captioning
Ruchika Chavhan, Biplab Banerjee, Xiao Xiang Zhu, Subhasis Chaudhuri
Auto-TLDR; Actor Dual-Critic Training for Remote Sensing Image Captioning Using Deep Reinforcement Learning
Abstract Slides Poster Similar
Explore and Explain: Self-Supervised Navigation and Recounting
Roberto Bigazzi, Federico Landi, Marcella Cornia, Silvia Cascianelli, Lorenzo Baraldi, Rita Cucchiara
Auto-TLDR; Exploring a Photorealistic Environment for Explanation and Navigation
ActionSpotter: Deep Reinforcement Learning Framework for Temporal Action Spotting in Videos
Guillaume Vaudaux-Ruth, Adrien Chan-Hon-Tong, Catherine Achard
Auto-TLDR; ActionSpotter: A Reinforcement Learning Algorithm for Action Spotting in Video
Abstract Slides Poster Similar
Visual Object Tracking in Drone Images with Deep Reinforcement Learning

Auto-TLDR; A Deep Reinforcement Learning based Single Object Tracker for Drone Applications
Abstract Slides Poster Similar
Adaptive Remote Sensing Image Attribute Learning for Active Object Detection
Nuo Xu, Chunlei Huo, Chunhong Pan
Auto-TLDR; Adaptive Image Attribute Learning for Active Object Detection
Class-Incremental Learning with Pre-Allocated Fixed Classifiers
Federico Pernici, Matteo Bruni, Claudio Baecchi, Francesco Turchini, Alberto Del Bimbo
Auto-TLDR; Class-Incremental Learning with Pre-allocated Output Nodes for Fixed Classifier
Abstract Slides Poster Similar
On Embodied Visual Navigation in Real Environments through Habitat
Marco Rosano, Antonino Furnari, Luigi Gulino, Giovanni Maria Farinella

Auto-TLDR; Learning Navigation Policies on Real World Observations using Real World Images and Sensor and Actuation Noise
Abstract Slides Poster Similar
Naturally Constrained Online Expectation Maximization
Daniela Pamplona, Antoine Manzanera

Auto-TLDR; Constrained Online Expectation-Maximization for Probabilistic Principal Components Analysis
Abstract Slides Poster Similar
Deep Next-Best-View Planner for Cross-Season Visual Route Classification
Auto-TLDR; Active Visual Place Recognition using Deep Convolutional Neural Network
Abstract Slides Poster Similar
Improving Visual Question Answering Using Active Perception on Static Images
Theodoros Bozinis, Nikolaos Passalis, Anastasios Tefas
Auto-TLDR; Fine-Grained Visual Question Answering with Reinforcement Learning-based Active Perception
Abstract Slides Poster Similar
RNN Training along Locally Optimal Trajectories via Frank-Wolfe Algorithm
Yun Yue, Ming Li, Venkatesh Saligrama, Ziming Zhang
Auto-TLDR; Frank-Wolfe Algorithm for Efficient Training of RNNs
Abstract Slides Poster Similar
E-DNAS: Differentiable Neural Architecture Search for Embedded Systems
Javier García López, Antonio Agudo, Francesc Moreno-Noguer
Auto-TLDR; E-DNAS: Differentiable Architecture Search for Light-Weight Networks for Image Classification
Abstract Slides Poster Similar
Dual-Memory Model for Incremental Learning: The Handwriting Recognition Use Case
Mélanie Piot, Bérangère Bourdoulous, Aurelia Deshayes, Lionel Prevost

Auto-TLDR; A dual memory model for handwriting recognition
Selecting Useful Knowledge from Previous Tasks for Future Learning in a Single Network
Feifei Shi, Peng Wang, Zhongchao Shi, Yong Rui
Auto-TLDR; Continual Learning with Gradient-based Threshold Threshold
Abstract Slides Poster Similar
Improving Robotic Grasping on Monocular Images Via Multi-Task Learning and Positional Loss
William Prew, Toby Breckon, Magnus Bordewich, Ulrik Beierholm

Auto-TLDR; Improving grasping performance from monocularcolour images in an end-to-end CNN architecture with multi-task learning
Abstract Slides Poster Similar
RLST: A Reinforcement Learning Approach to Scene Text Detection Refinement
Xuan Peng, Zheng Huang, Kai Chen, Jie Guo, Weidong Qiu
Auto-TLDR; Saccadic Eye Movements and Peripheral Vision for Scene Text Detection using Reinforcement Learning
Abstract Slides Poster Similar
P-DIFF: Learning Classifier with Noisy Labels Based on Probability Difference Distributions
Wei Hu, Qihao Zhao, Yangyu Huang, Fan Zhang
Auto-TLDR; P-DIFF: A Simple and Effective Training Paradigm for Deep Neural Network Classifier with Noisy Labels
Abstract Slides Poster Similar
RSAC: Regularized Subspace Approximation Classifier for Lightweight Continuous Learning
Auto-TLDR; Regularized Subspace Approximation Classifier for Lightweight Continuous Learning
Abstract Slides Poster Similar
SAILenv: Learning in Virtual Visual Environments Made Simple
Enrico Meloni, Luca Pasqualini, Matteo Tiezzi, Marco Gori, Stefano Melacci

Auto-TLDR; SAILenv: A Simple and Customized Platform for Visual Recognition in Virtual 3D Environment
Abstract Slides Poster Similar
P2 Net: Augmented Parallel-Pyramid Net for Attention Guided Pose Estimation
Luanxuan Hou, Jie Cao, Yuan Zhao, Haifeng Shen, Jian Tang, Ran He
Auto-TLDR; Parallel-Pyramid Net with Partial Attention for Human Pose Estimation
Abstract Slides Poster Similar
Resource-efficient DNNs for Keyword Spotting using Neural Architecture Search and Quantization
David Peter, Wolfgang Roth, Franz Pernkopf
Auto-TLDR; Neural Architecture Search for Keyword Spotting in Limited Resource Environments
Abstract Slides Poster Similar
Recurrent Deep Attention Network for Person Re-Identification
Changhao Wang, Jun Zhou, Xianfei Duan, Guanwen Zhang, Wei Zhou
Auto-TLDR; Recurrent Deep Attention Network for Person Re-identification
Abstract Slides Poster Similar
Learning with Delayed Feedback
Pranavan Theivendiram, Terence Sim
Auto-TLDR; Unsupervised Machine Learning with Delayed Feedback
Abstract Slides Poster Similar
ILS-SUMM: Iterated Local Search for Unsupervised Video Summarization
Yair Shemer, Daniel Rotman, Nahum Shimkin
Auto-TLDR; ILS-SUMM: Iterated Local Search for Video Summarization
Multiple Future Prediction Leveraging Synthetic Trajectories
Lorenzo Berlincioni, Federico Becattini, Lorenzo Seidenari, Alberto Del Bimbo

Auto-TLDR; Synthetic Trajectory Prediction using Markov Chains
Abstract Slides Poster Similar
An Efficient Empirical Solver for Localized Multiple Kernel Learning Via DNNs
Auto-TLDR; Localized Multiple Kernel Learning using LMKL-Net
Abstract Slides Poster Similar
Adaptive Noise Injection for Training Stochastic Student Networks from Deterministic Teachers
Yi Xiang Marcus Tan, Yuval Elovici, Alexander Binder
Auto-TLDR; Adaptive Stochastic Networks for Adversarial Attacks
Spiking Neural Networks with Single-Spike Temporal-Coded Neurons for Network Intrusion Detection
Auto-TLDR; Spiking Neural Network with Leaky Neurons
Abstract Slides Poster Similar
Active Sampling for Pairwise Comparisons via Approximate Message Passing and Information Gain Maximization
Aliaksei Mikhailiuk, Clifford Wilmot, Maria Perez-Ortiz, Dingcheng Yue, Rafal Mantiuk
Auto-TLDR; ASAP: An Active Sampling Algorithm for Pairwise Comparison Data
VOWEL: A Local Online Learning Rule for Recurrent Networks of Probabilistic Spiking Winner-Take-All Circuits
Hyeryung Jang, Nicolas Skatchkovsky, Osvaldo Simeone
Auto-TLDR; VOWEL: A Variational Online Local Training Rule for Winner-Take-All Spiking Neural Networks
Meta Soft Label Generation for Noisy Labels

Auto-TLDR; MSLG: Meta-Learning for Noisy Label Generation
Abstract Slides Poster Similar
Regularized Flexible Activation Function Combinations for Deep Neural Networks
Renlong Jie, Junbin Gao, Andrey Vasnev, Minh-Ngoc Tran
Auto-TLDR; Flexible Activation in Deep Neural Networks using ReLU and ELUs
Abstract Slides Poster Similar
Stage-Wise Neural Architecture Search
Artur Jordão, Fernando Akio Yamada, Maiko Lie, William Schwartz
Auto-TLDR; Efficient Neural Architecture Search for Deep Convolutional Networks
Abstract Slides Poster Similar