In Depth Semantic Scene Completion
Auto-TLDR; Bayesian Convolutional Neural Network for Semantic Scene Completion
Similar papers
EdgeNet: Semantic Scene Completion from a Single RGB-D Image
Aloisio Dourado, Teofilo De Campos, Adrian Hilton, Hansung Kim

Auto-TLDR; Semantic Scene Completion using 3D Depth and RGB Information
Abstract Slides Poster Similar
Separation of Aleatoric and Epistemic Uncertainty in Deterministic Deep Neural Networks
Denis Huseljic, Bernhard Sick, Marek Herde, Daniel Kottke
Auto-TLDR; AE-DNN: Modeling Uncertainty in Deep Neural Networks
Abstract Slides Poster Similar
Self-Supervised Detection and Pose Estimation of Logistical Objects in 3D Sensor Data
Nikolas Müller, Jonas Stenzel, Jian-Jia Chen

Auto-TLDR; A self-supervised and fully automated deep learning approach for object pose estimation using simulated 3D data
Abstract Slides Poster Similar
Quantifying Model Uncertainty in Inverse Problems Via Bayesian Deep Gradient Descent
Riccardo Barbano, Chen Zhang, Simon Arridge, Bangti Jin
Auto-TLDR; Bayesian Neural Networks for Inverse Reconstruction via Bayesian Knowledge-Aided Computation
Abstract Slides Poster Similar
Progressive Scene Segmentation Based on Self-Attention Mechanism
Yunyi Pan, Yuan Gan, Kun Liu, Yan Zhang

Auto-TLDR; Two-Stage Semantic Scene Segmentation with Self-Attention
Abstract Slides Poster Similar
Generalization Comparison of Deep Neural Networks Via Output Sensitivity
Mahsa Forouzesh, Farnood Salehi, Patrick Thiran
Auto-TLDR; Generalization of Deep Neural Networks using Sensitivity
Enhancing Semantic Segmentation of Aerial Images with Inhibitory Neurons
Ihsan Ullah, Sean Reilly, Michael Madden
Auto-TLDR; Lateral Inhibition in Deep Neural Networks for Object Recognition and Semantic Segmentation
Abstract Slides Poster Similar
A Fine-Grained Dataset and Its Efficient Semantic Segmentation for Unstructured Driving Scenarios
Kai Andreas Metzger, Peter Mortimer, Hans J "Joe" Wuensche

Auto-TLDR; TAS500: A Semantic Segmentation Dataset for Autonomous Driving in Unstructured Environments
Abstract Slides Poster Similar
Confidence Calibration for Deep Renal Biopsy Immunofluorescence Image Classification
Federico Pollastri, Juan Maroñas, Federico Bolelli, Giulia Ligabue, Roberto Paredes, Riccardo Magistroni, Costantino Grana
Auto-TLDR; A Probabilistic Convolutional Neural Network for Immunofluorescence Classification in Renal Biopsy
Abstract Slides Poster Similar
FatNet: A Feature-Attentive Network for 3D Point Cloud Processing
Chaitanya Kaul, Nick Pears, Suresh Manandhar

Auto-TLDR; Feature-Attentive Neural Networks for Point Cloud Classification and Segmentation
A Bayesian Approach to Reinforcement Learning of Vision-Based Vehicular Control
Zahra Gharaee, Karl Holmquist, Linbo He, Michael Felsberg

Auto-TLDR; Bayesian Reinforcement Learning for Autonomous Driving
Abstract Slides Poster Similar
WeightAlign: Normalizing Activations by Weight Alignment
Xiangwei Shi, Yunqiang Li, Xin Liu, Jan Van Gemert
Auto-TLDR; WeightAlign: Normalization of Activations without Sample Statistics
Abstract Slides Poster Similar
Improving Model Accuracy for Imbalanced Image Classification Tasks by Adding a Final Batch Normalization Layer: An Empirical Study
Veysel Kocaman, Ofer M. Shir, Thomas Baeck
Auto-TLDR; Exploiting Batch Normalization before the Output Layer in Deep Learning for Minority Class Detection in Imbalanced Data Sets
Abstract Slides Poster Similar
Variational Capsule Encoder
Harish Raviprakash, Syed Anwar, Ulas Bagci
Auto-TLDR; Bayesian Capsule Networks for Representation Learning in latent space
Abstract Slides Poster Similar
3D Semantic Labeling of Photogrammetry Meshes Based on Active Learning
Mengqi Rong, Shuhan Shen, Zhanyi Hu

Auto-TLDR; 3D Semantic Expression of Urban Scenes Based on Active Learning
Abstract Slides Poster Similar
Uncertainty-Sensitive Activity Recognition: A Reliability Benchmark and the CARING Models
Alina Roitberg, Monica Haurilet, Manuel Martinez, Rainer Stiefelhagen
Auto-TLDR; CARING: Calibrated Action Recognition with Input Guidance
Surface Material Dataset for Robotics Applications (SMDRA): A Dataset with Friction Coefficient and RGB-D for Surface Segmentation
Donghun Noh, Hyunwoo Nam, Min Sung Ahn, Hosik Chae, Sangjoon Lee, Kyle Gillespie, Dennis Hong
Auto-TLDR; A Surface Material Dataset for Robotics Applications
Abstract Slides Poster Similar
Enhancing Deep Semantic Segmentation of RGB-D Data with Entangled Forests
Matteo Terreran, Elia Bonetto, Stefano Ghidoni

Auto-TLDR; FuseNet: A Lighter Deep Learning Model for Semantic Segmentation
Abstract Slides Poster Similar
Improving Robotic Grasping on Monocular Images Via Multi-Task Learning and Positional Loss
William Prew, Toby Breckon, Magnus Bordewich, Ulrik Beierholm

Auto-TLDR; Improving grasping performance from monocularcolour images in an end-to-end CNN architecture with multi-task learning
Abstract Slides Poster Similar
Uncertainty Guided Recognition of Tiny Craters on the Moon
Thorsten Wilhelm, Christian Wöhler

Auto-TLDR; Accurately Detecting Tiny Craters in Remote Sensed Images Using Deep Neural Networks
Abstract Slides Poster Similar
Fast and Accurate Real-Time Semantic Segmentation with Dilated Asymmetric Convolutions
Leonel Rosas-Arias, Gibran Benitez-Garcia, Jose Portillo-Portillo, Gabriel Sanchez-Perez, Keiji Yanai

Auto-TLDR; FASSD-Net: Dilated Asymmetric Pyramidal Fusion for Real-Time Semantic Segmentation
Abstract Slides Poster Similar
Ghost Target Detection in 3D Radar Data Using Point Cloud Based Deep Neural Network
Mahdi Chamseddine, Jason Rambach, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; Point Based Deep Learning for Ghost Target Detection in 3D Radar Point Clouds
Abstract Slides Poster Similar
Contextual Classification Using Self-Supervised Auxiliary Models for Deep Neural Networks
Sebastian Palacio, Philipp Engler, Jörn Hees, Andreas Dengel
Auto-TLDR; Self-Supervised Autogenous Learning for Deep Neural Networks
Abstract Slides Poster Similar
Mutual Information Based Method for Unsupervised Disentanglement of Video Representation
Aditya Sreekar P, Ujjwal Tiwari, Anoop Namboodiri
Auto-TLDR; MIPAE: Mutual Information Predictive Auto-Encoder for Video Prediction
Abstract Slides Poster Similar
Reducing the Variance of Variational Estimates of Mutual Information by Limiting the Critic's Hypothesis Space to RKHS
Aditya Sreekar P, Ujjwal Tiwari, Anoop Namboodiri
Auto-TLDR; Mutual Information Estimation from Variational Lower Bounds Using a Critic's Hypothesis Space
Variational Deep Embedding Clustering by Augmented Mutual Information Maximization
Qiang Ji, Yanfeng Sun, Yongli Hu, Baocai Yin
Auto-TLDR; Clustering by Augmented Mutual Information maximization for Deep Embedding
Abstract Slides Poster Similar
Deep Space Probing for Point Cloud Analysis
Yirong Yang, Bin Fan, Yongcheng Liu, Hua Lin, Jiyong Zhang, Xin Liu, 蔡鑫宇 蔡鑫宇, Shiming Xiang, Chunhong Pan

Auto-TLDR; SPCNN: Space Probing Convolutional Neural Network for Point Cloud Analysis
Abstract Slides Poster Similar
Variational Information Bottleneck Model for Accurate Indoor Position Recognition
Auto-TLDR; Variational Information Bottleneck for Indoor Positioning with WiFi Fingerprints
Abstract Slides Poster Similar
On-Manifold Adversarial Data Augmentation Improves Uncertainty Calibration
Kanil Patel, William Beluch, Dan Zhang, Michael Pfeiffer, Bin Yang
Auto-TLDR; On-Manifold Adversarial Data Augmentation for Uncertainty Estimation
Filtered Batch Normalization
András Horváth, Jalal Al-Afandi
Auto-TLDR; Batch Normalization with Out-of-Distribution Activations in Deep Neural Networks
Abstract Slides Poster Similar
Towards Efficient 3D Point Cloud Scene Completion Via Novel Depth View Synthesis
Haiyan Wang, Liang Yang, Xuejian Rong, Ying-Li Tian

Auto-TLDR; 3D Point Cloud Completion with Depth View Synthesis and Depth View synthesis
Factor Screening Using Bayesian Active Learning and Gaussian Process Meta-Modelling
Cheng Li, Santu Rana, Andrew William Gill, Dang Nguyen, Sunil Kumar Gupta, Svetha Venkatesh

Auto-TLDR; Data-Efficient Bayesian Active Learning for Factor Screening in Combat Simulations
Explore and Explain: Self-Supervised Navigation and Recounting
Roberto Bigazzi, Federico Landi, Marcella Cornia, Silvia Cascianelli, Lorenzo Baraldi, Rita Cucchiara
Auto-TLDR; Exploring a Photorealistic Environment for Explanation and Navigation
Directional Graph Networks with Hard Weight Assignments
Miguel Dominguez, Raymond Ptucha
Auto-TLDR; Hard Directional Graph Networks for Point Cloud Analysis
Abstract Slides Poster Similar
OCT Image Segmentation Using NeuralArchitecture Search and SRGAN
Saba Heidari, Omid Dehzangi, Nasser M. Nasarabadi, Ali Rezai
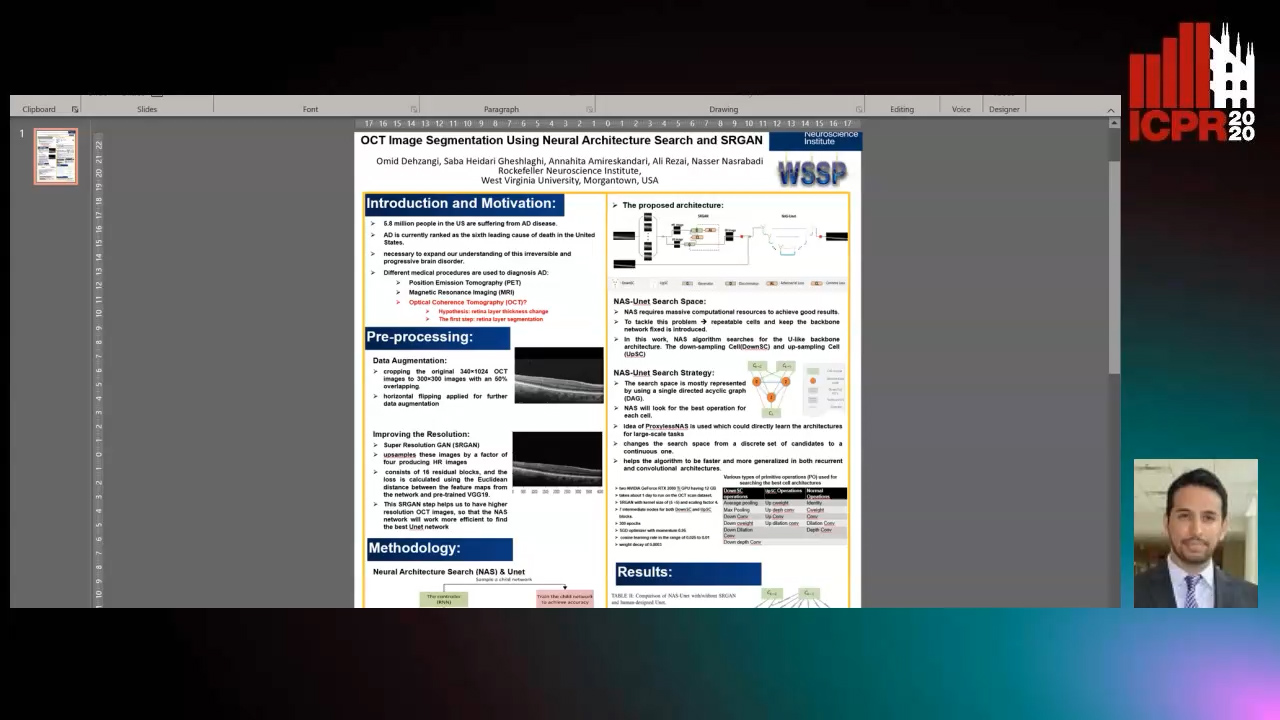
Auto-TLDR; Automatic Segmentation of Retinal Layers in Optical Coherence Tomography using Neural Architecture Search
Deep Ordinal Regression with Label Diversity
Axel Berg, Magnus Oskarsson, Mark Oconnor

Auto-TLDR; Discrete Regression via Classification for Neural Network Learning
PC-Net: A Deep Network for 3D Point Clouds Analysis
Zhuo Chen, Tao Guan, Yawei Luo, Yuesong Wang

Auto-TLDR; PC-Net: A Hierarchical Neural Network for 3D Point Clouds Analysis
Abstract Slides Poster Similar
PointSpherical: Deep Shape Context for Point Cloud Learning in Spherical Coordinates
Hua Lin, Bin Fan, Yongcheng Liu, Yirong Yang, Zheng Pan, Jianbo Shi, Chunhong Pan, Huiwen Xie

Auto-TLDR; Spherical Hierarchical Modeling of 3D Point Cloud
Abstract Slides Poster Similar
Planar 3D Transfer Learning for End to End Unimodal MRI Unbalanced Data Segmentation
Martin Kolarik, Radim Burget, Carlos M. Travieso-Gonzalez, Jan Kocica
Auto-TLDR; Planar 3D Res-U-Net Network for Unbalanced 3D Image Segmentation using Fluid Attenuation Inversion Recover
Improving Batch Normalization with Skewness Reduction for Deep Neural Networks
Pak Lun Kevin Ding, Martin Sarah, Baoxin Li
Auto-TLDR; Batch Normalization with Skewness Reduction
Abstract Slides Poster Similar
Deep Transformation Models: Tackling Complex Regression Problems with Neural Network Based Transformation Models
Beate Sick, Torsten Hothorn, Oliver Dürr
Auto-TLDR; A Deep Transformation Model for Probabilistic Regression
Abstract Slides Poster Similar
Domain Siamese CNNs for Sparse Multispectral Disparity Estimation
David-Alexandre Beaupre, Guillaume-Alexandre Bilodeau

Auto-TLDR; Multispectral Disparity Estimation between Thermal and Visible Images using Deep Neural Networks
Abstract Slides Poster Similar
Deep Universal Blind Image Denoising
Auto-TLDR; Image Denoising with Deep Convolutional Neural Networks
A Joint Representation Learning and Feature Modeling Approach for One-Class Recognition
Pramuditha Perera, Vishal Patel
Auto-TLDR; Combining Generative Features and One-Class Classification for Effective One-class Recognition
Abstract Slides Poster Similar
On Resource-Efficient Bayesian Network Classifiers and Deep Neural Networks
Wolfgang Roth, Günther Schindler, Holger Fröning, Franz Pernkopf
Auto-TLDR; Quantization-Aware Bayesian Network Classifiers for Small-Scale Scenarios
Abstract Slides Poster Similar
GAN-Based Gaussian Mixture Model Responsibility Learning
Wanming Huang, Yi Da Xu, Shuai Jiang, Xuan Liang, Ian Oppermann
Auto-TLDR; Posterior Consistency Module for Gaussian Mixture Model
Abstract Slides Poster Similar
Bayesian Active Learning for Maximal Information Gain on Model Parameters
Kasra Arnavaz, Aasa Feragen, Oswin Krause, Marco Loog
Auto-TLDR; Bayesian assumptions for Bayesian classification
Abstract Slides Poster Similar
NetCalib: A Novel Approach for LiDAR-Camera Auto-Calibration Based on Deep Learning
Shan Wu, Amnir Hadachi, Damien Vivet, Yadu Prabhakar

Auto-TLDR; Automatic Calibration of LiDAR and Cameras using Deep Neural Network
Abstract Slides Poster Similar