Road Network Metric Learning for Estimated Time of Arrival
Yiwen Sun,
Kun Fu,
Zheng Wang,
Changshui Zhang,
Jieping Ye
Auto-TLDR; Road Network Metric Learning for Estimated Time of Arrival (RNML-ETA)
Similar papers
Constructing Geographic and Long-term Temporal Graph for Traffic Forecasting
Yiwen Sun, Yulu Wang, Kun Fu, Zheng Wang, Changshui Zhang, Jieping Ye
Auto-TLDR; GLT-GCRNN: Geographic and Long-term Temporal Graph Convolutional Recurrent Neural Network for Traffic Forecasting
Abstract Slides Poster Similar
Trajectory-User Link with Attention Recurrent Networks
Tao Sun, Yongjun Xu, Fei Wang, Lin Wu, 塘文 钱, Zezhi Shao
Auto-TLDR; TULAR: Trajectory-User Link with Attention Recurrent Neural Networks
Abstract Slides Poster Similar
Geographic-Semantic-Temporal Hypergraph Convolutional Network for Traffic Flow Prediction
Kesu Wang, Jing Chen, Shijie Liao, Jiaxin Hou, Qingyu Xiong

Auto-TLDR; Geographic-semantic-temporal convolutional network for traffic flow prediction
Transfer Learning with Graph Neural Networks for Short-Term Highway Traffic Forecasting
Tanwi Mallick, Prasanna Balaprakash, Eric Rask, Jane Macfarlane
Auto-TLDR; Transfer Learning for Highway Traffic Forecasting on Unseen Traffic Networks
Abstract Slides Poster Similar
Holistic Grid Fusion Based Stop Line Estimation
Runsheng Xu, Faezeh Tafazzoli, Li Zhang, Timo Rehfeld, Gunther Krehl, Arunava Seal

Auto-TLDR; Fused Multi-Sensory Data for Stop Lines Detection in Intersection Scenarios
Cross-Lingual Text Image Recognition Via Multi-Task Sequence to Sequence Learning
Zhuo Chen, Fei Yin, Xu-Yao Zhang, Qing Yang, Cheng-Lin Liu
Auto-TLDR; Cross-Lingual Text Image Recognition with Multi-task Learning
Abstract Slides Poster Similar
Map-Based Temporally Consistent Geolocalization through Learning Motion Trajectories

Auto-TLDR; Exploiting Motion Trajectories for Geolocalization of Object on Topological Map using Recurrent Neural Network
Abstract Slides Poster Similar
Emerging Relation Network and Task Embedding for Multi-Task Regression Problems
Auto-TLDR; A Comparative Study of Multi-Task Learning for Non-linear Time Series Problems
Abstract Slides Poster Similar
Edge-Aware Graph Attention Network for Ratio of Edge-User Estimation in Mobile Networks
Jiehui Deng, Sheng Wan, Xiang Wang, Enmei Tu, Xiaolin Huang, Jie Yang, Chen Gong
Auto-TLDR; EAGAT: Edge-Aware Graph Attention Network for Automatic REU Estimation in Mobile Networks
Abstract Slides Poster Similar
Temporal Collaborative Filtering with Graph Convolutional Neural Networks
Esther Rodrigo-Bonet, Minh Duc Nguyen, Nikos Deligiannis
Auto-TLDR; Temporal Collaborative Filtering with Graph-Neural-Network-based Neural Networks
Abstract Slides Poster Similar
MA-LSTM: A Multi-Attention Based LSTM for Complex Pattern Extraction
Jingjie Guo, Kelang Tian, Kejiang Ye, Cheng-Zhong Xu
Auto-TLDR; MA-LSTM: Multiple Attention based recurrent neural network for forget gate
Abstract Slides Poster Similar
Interpretable Structured Learning with Sparse Gated Sequence Encoder for Protein-Protein Interaction Prediction
Kishan K C, Feng Cui, Anne Haake, Rui Li
Auto-TLDR; Predicting Protein-Protein Interactions Using Sequence Representations
Abstract Slides Poster Similar
Sketch-SNet: Deeper Subdivision of Temporal Cues for Sketch Recognition
Yizhou Tan, Lan Yang, Honggang Zhang
Auto-TLDR; Sketch Recognition using Invariable Structural Feature and Drawing Habits Feature
Abstract Slides Poster Similar
Multi-Label Contrastive Focal Loss for Pedestrian Attribute Recognition
Xiaoqiang Zheng, Zhenxia Yu, Lin Chen, Fan Zhu, Shilong Wang

Auto-TLDR; Multi-label Contrastive Focal Loss for Pedestrian Attribute Recognition
Abstract Slides Poster Similar
Progressive Learning Algorithm for Efficient Person Re-Identification
Zhen Li, Hanyang Shao, Liang Niu, Nian Xue
Auto-TLDR; Progressive Learning Algorithm for Large-Scale Person Re-Identification
Abstract Slides Poster Similar
PIN: A Novel Parallel Interactive Network for Spoken Language Understanding
Peilin Zhou, Zhiqi Huang, Fenglin Liu, Yuexian Zou
Auto-TLDR; Parallel Interactive Network for Spoken Language Understanding
Abstract Slides Poster Similar
Learning Neural Textual Representations for Citation Recommendation
Thanh Binh Kieu, Inigo Jauregi Unanue, Son Bao Pham, Xuan-Hieu Phan, M. Piccardi
Auto-TLDR; Sentence-BERT cascaded with Siamese and triplet networks for citation recommendation
Abstract Slides Poster Similar
EasiECG: A Novel Inter-Patient Arrhythmia Classification Method Using ECG Waves
Chuanqi Han, Ruoran Huang, Fang Yu, Xi Huang, Li Cui
Auto-TLDR; EasiECG: Attention-based Convolution Factorization Machines for Arrhythmia Classification
Abstract Slides Poster Similar
Nonlinear Ranking Loss on Riemannian Potato Embedding
Byung Hyung Kim, Yoonje Suh, Honggu Lee, Sungho Jo
Auto-TLDR; Riemannian Potato for Rank-based Metric Learning
Abstract Slides Poster Similar
Trajectory Representation Learning for Multi-Task NMRDP Planning
Firas Jarboui, Vianney Perchet
Auto-TLDR; Exploring Non Markovian Reward Decision Processes for Reinforcement Learning
Abstract Slides Poster Similar
Multi-Graph Convolutional Network for Relationship-Driven Stock Movement Prediction
Jiexia Ye, Juanjuan Zhao, Kejiang Ye, Cheng-Zhong Xu
Auto-TLDR; Multi-GCGRU: A Deep Learning Framework for Stock Price Prediction with Cross Effect
Abstract Slides Poster Similar
Transformer Networks for Trajectory Forecasting
Francesco Giuliari, Hasan Irtiza, Marco Cristani, Fabio Galasso
Auto-TLDR; TransformerNetworks for Trajectory Prediction of People Interactions
Abstract Slides Poster Similar
Wireless Localisation in WiFi Using Novel Deep Architectures
Peizheng Li, Han Cui, Aftab Khan, Usman Raza, Robert Piechocki, Angela Doufexi, Tim Farnham
Auto-TLDR; Deep Neural Network for Indoor Localisation of WiFi Devices in Indoor Environments
Abstract Slides Poster Similar
Improving Gravitational Wave Detection with 2D Convolutional Neural Networks
Siyu Fan, Yisen Wang, Yuan Luo, Alexander Michael Schmitt, Shenghua Yu
Auto-TLDR; Two-dimensional Convolutional Neural Networks for Gravitational Wave Detection from Time Series with Background Noise
Real-Time End-To-End Lane ID Estimation Using Recurrent Networks
Ibrahim Halfaoui, Fahd Bouzaraa, Onay Urfalioglu

Auto-TLDR; Real-Time, Vision-Only Lane Identification Using Monocular Camera
Abstract Slides Poster Similar
AG-GAN: An Attentive Group-Aware GAN for Pedestrian Trajectory Prediction
Yue Song, Niccolò Bisagno, Syed Zohaib Hassan, Nicola Conci
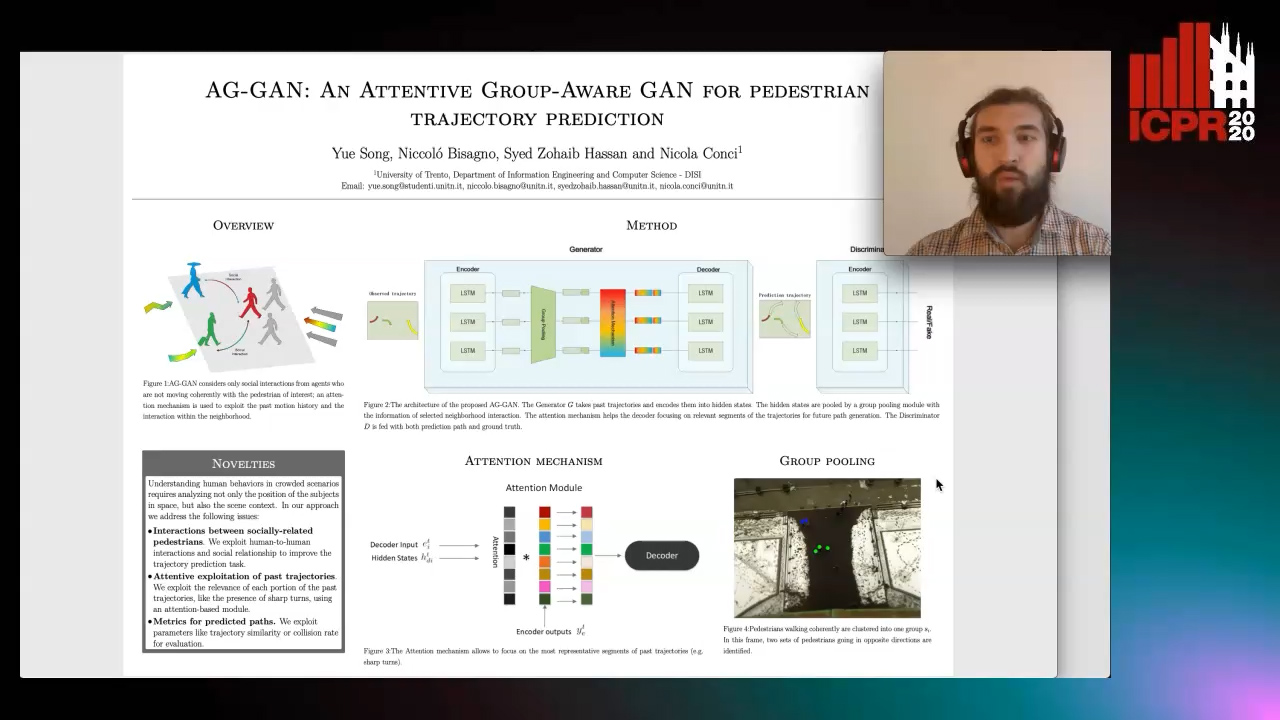
Auto-TLDR; An attentive group-aware GAN for motion prediction in crowded scenarios
Abstract Slides Poster Similar
Improved Deep Classwise Hashing with Centers Similarity Learning for Image Retrieval
Auto-TLDR; Deep Classwise Hashing for Image Retrieval Using Center Similarity Learning
Abstract Slides Poster Similar
RSINet: Rotation-Scale Invariant Network for Online Visual Tracking
Yang Fang, Geunsik Jo, Chang-Hee Lee

Auto-TLDR; RSINet: Rotation-Scale Invariant Network for Adaptive Tracking
Abstract Slides Poster Similar
Attentive Part-Aware Networks for Partial Person Re-Identification
Lijuan Huo, Chunfeng Song, Zhengyi Liu, Zhaoxiang Zhang
Auto-TLDR; Part-Aware Learning for Partial Person Re-identification
Abstract Slides Poster Similar
Multiple Future Prediction Leveraging Synthetic Trajectories
Lorenzo Berlincioni, Federico Becattini, Lorenzo Seidenari, Alberto Del Bimbo

Auto-TLDR; Synthetic Trajectory Prediction using Markov Chains
Abstract Slides Poster Similar
Deep Top-Rank Counter Metric for Person Re-Identification
Chen Chen, Hao Dou, Xiyuan Hu, Silong Peng
Auto-TLDR; Deep Top-Rank Counter Metric for Person Re-identification
Abstract Slides Poster Similar
Enhanced User Interest and Expertise Modeling for Expert Recommendation
Tongze He, Caili Guo, Yunfei Chu

Auto-TLDR; A Unified Framework for Expert Recommendation in Community Question Answering
Abstract Slides Poster Similar
Generalized Local Attention Pooling for Deep Metric Learning
Carlos Roig Mari, David Varas, Issey Masuda, Juan Carlos Riveiro, Elisenda Bou-Balust
Auto-TLDR; Generalized Local Attention Pooling for Deep Metric Learning
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Multi-Level Deep Learning Vehicle Re-Identification Using Ranked-Based Loss Functions
Eleni Kamenou, Jesus Martinez-Del-Rincon, Paul Miller, Patricia Devlin - Hill
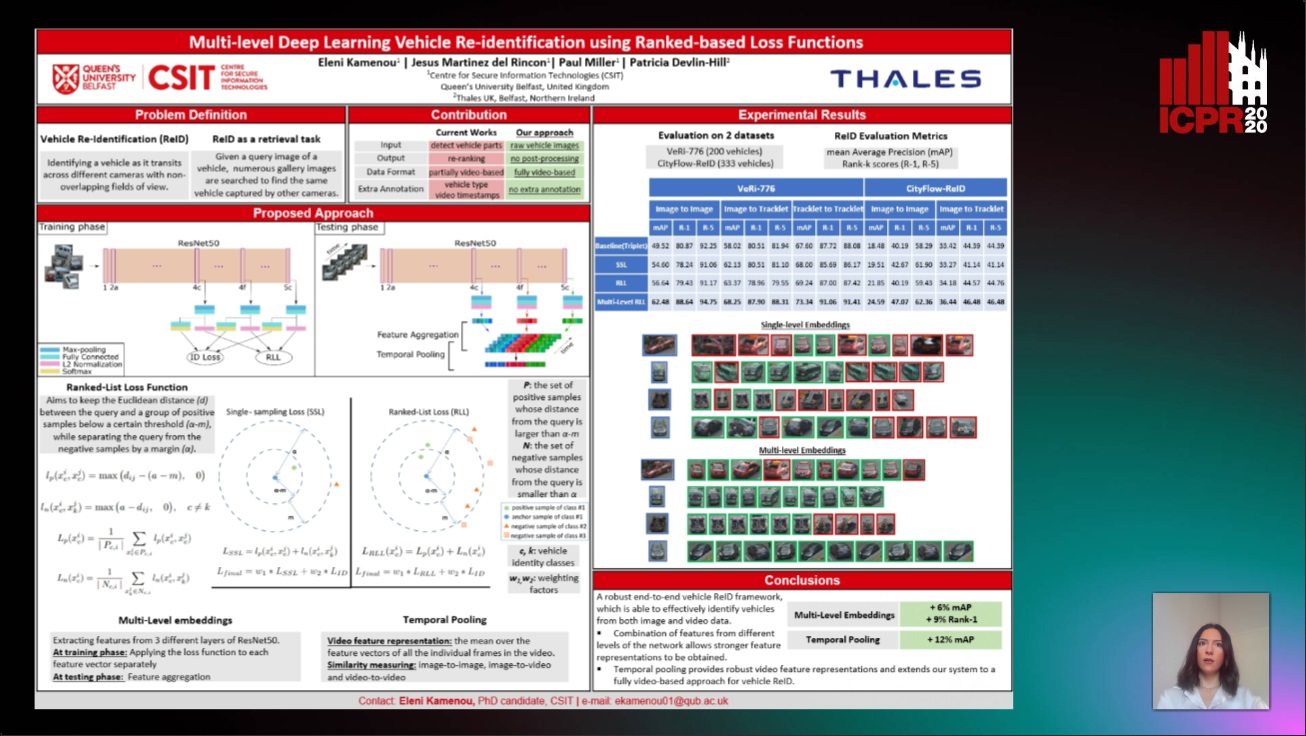
Auto-TLDR; Multi-Level Re-identification Network for Vehicle Re-Identification
Abstract Slides Poster Similar
Label Incorporated Graph Neural Networks for Text Classification
Yuan Xin, Linli Xu, Junliang Guo, Jiquan Li, Xin Sheng, Yuanyuan Zhou
Auto-TLDR; Graph Neural Networks for Semi-supervised Text Classification
Abstract Slides Poster Similar
Equation Attention Relationship Network (EARN) : A Geometric Deep Metric Framework for Learning Similar Math Expression Embedding
Saleem Ahmed, Kenny Davila, Srirangaraj Setlur, Venu Govindaraju
Auto-TLDR; Representational Learning for Similarity Based Retrieval of Mathematical Expressions
Abstract Slides Poster Similar
Zero-Shot Text Classification with Semantically Extended Graph Convolutional Network
Tengfei Liu, Yongli Hu, Junbin Gao, Yanfeng Sun, Baocai Yin
Auto-TLDR; Semantically Extended Graph Convolutional Network for Zero-shot Text Classification
Abstract Slides Poster Similar
Loop-closure detection by LiDAR scan re-identification
Jukka Peltomäki, Xingyang Ni, Jussi Puura, Joni-Kristian Kamarainen, Heikki Juhani Huttunen

Auto-TLDR; Loop-Closing Detection from LiDAR Scans Using Convolutional Neural Networks
Abstract Slides Poster Similar
End-To-End Hierarchical Relation Extraction for Generic Form Understanding
Tuan Anh Nguyen Dang, Duc-Thanh Hoang, Quang Bach Tran, Chih-Wei Pan, Thanh-Dat Nguyen
Auto-TLDR; Joint Entity Labeling and Link Prediction for Form Understanding in Noisy Scanned Documents
Abstract Slides Poster Similar
Picture-To-Amount (PITA): Predicting Relative Ingredient Amounts from Food Images
Jiatong Li, Fangda Han, Ricardo Guerrero, Vladimir Pavlovic
Auto-TLDR; PITA: A Deep Learning Architecture for Predicting the Relative Amount of Ingredients from Food Images
Abstract Slides Poster Similar
Deep Convolutional Embedding for Digitized Painting Clustering
Giovanna Castellano, Gennaro Vessio
Auto-TLDR; A Deep Convolutional Embedding Model for Clustering Artworks
Abstract Slides Poster Similar
PICK: Processing Key Information Extraction from Documents Using Improved Graph Learning-Convolutional Networks
Wenwen Yu, Ning Lu, Xianbiao Qi, Ping Gong, Rong Xiao
Auto-TLDR; PICK: A Graph Learning Framework for Key Information Extraction from Documents
Abstract Slides Poster Similar
Vehicle Lane Merge Visual Benchmark

Auto-TLDR; A Benchmark for Automated Cooperative Maneuvering Using Multi-view Video Streams and Ground Truth Vehicle Description
Abstract Slides Poster Similar
Named Entity Recognition and Relation Extraction with Graph Neural Networks in Semi Structured Documents
Manuel Carbonell, Pau Riba, Mauricio Villegas, Alicia Fornés, Josep Llados
Auto-TLDR; Graph Neural Network for Entity Recognition and Relation Extraction in Semi-Structured Documents
Not 3D Re-ID: Simple Single Stream 2D Convolution for Robust Video Re-Identification
Auto-TLDR; ResNet50-IBN for Video-based Person Re-Identification using Single Stream 2D Convolution Network
Abstract Slides Poster Similar
Progressive Unsupervised Domain Adaptation for Image-Based Person Re-Identification
Mingliang Yang, Da Huang, Jing Zhao
Auto-TLDR; Progressive Unsupervised Domain Adaptation for Person Re-Identification
Abstract Slides Poster Similar
RGB-Infrared Person Re-Identification Via Image Modality Conversion
Huangpeng Dai, Qing Xie, Yanchun Ma, Yongjian Liu, Shengwu Xiong
Auto-TLDR; CE2L: A Novel Network for Cross-Modality Re-identification with Feature Alignment
Abstract Slides Poster Similar