Reducing False Positives in Object Tracking with Siamese Network
Takuya Ogawa,
Takashi Shibata,
Shoji Yachida,
Toshinori Hosoi
Auto-TLDR; Robust Long-Term Object Tracking with Adaptive Search based on Motion Models
Similar papers
Model Decay in Long-Term Tracking
Efstratios Gavves, Ran Tao, Deepak Gupta, Arnold Smeulders
Auto-TLDR; Model Bias in Long-Term Tracking
Abstract Slides Poster Similar
DAL: A Deep Depth-Aware Long-Term Tracker
Yanlin Qian, Song Yan, Alan Lukežič, Matej Kristan, Joni-Kristian Kamarainen, Jiri Matas

Auto-TLDR; Deep Depth-Aware Long-Term RGBD Tracking with Deep Discriminative Correlation Filter
Abstract Slides Poster Similar
Siamese Fully Convolutional Tracker with Motion Correction
Mathew Francis, Prithwijit Guha

Auto-TLDR; A Siamese Ensemble for Visual Tracking with Appearance and Motion Components
Abstract Slides Poster Similar
VTT: Long-Term Visual Tracking with Transformers
Tianling Bian, Yang Hua, Tao Song, Zhengui Xue, Ruhui Ma, Neil Robertson, Haibing Guan
Auto-TLDR; Visual Tracking Transformer with transformers for long-term visual tracking
Efficient Correlation Filter Tracking with Adaptive Training Sample Update Scheme
Shan Jiang, Shuxiao Li, Chengfei Zhu, Nan Yan
Auto-TLDR; Adaptive Training Sample Update Scheme of Correlation Filter Based Trackers for Visual Tracking
Abstract Slides Poster Similar
TSDM: Tracking by SiamRPN++ with a Depth-Refiner and a Mask-Generator
Pengyao Zhao, Quanli Liu, Wei Wang, Qiang Guo
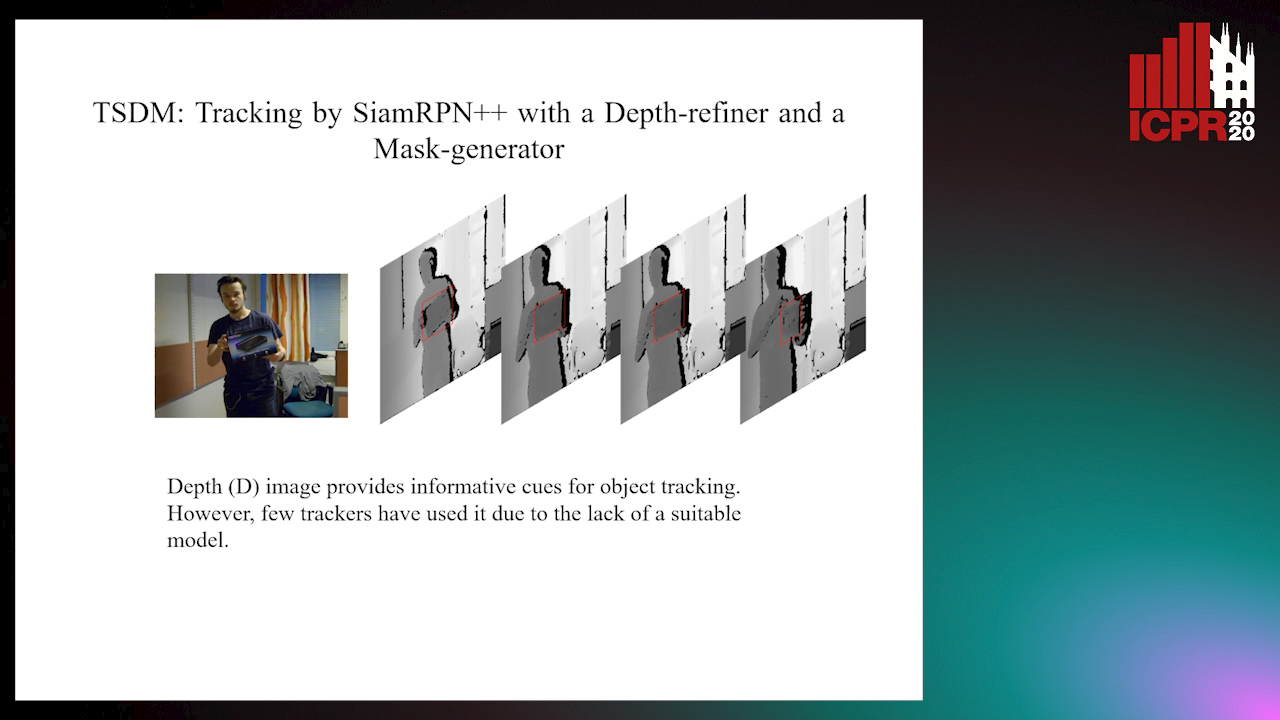
Auto-TLDR; TSDM: A Depth-D Tracker for 3D Object Tracking
Abstract Slides Poster Similar
RSINet: Rotation-Scale Invariant Network for Online Visual Tracking
Yang Fang, Geunsik Jo, Chang-Hee Lee

Auto-TLDR; RSINet: Rotation-Scale Invariant Network for Adaptive Tracking
Abstract Slides Poster Similar
Tackling Occlusion in Siamese Tracking with Structured Dropouts
Deepak Gupta, Efstratios Gavves, Arnold Smeulders
Auto-TLDR; Structured Dropout for Occlusion in latent space
Abstract Slides Poster Similar
Exploiting Distilled Learning for Deep Siamese Tracking
Chengxin Liu, Zhiguo Cao, Wei Li, Yang Xiao, Shuaiyuan Du, Angfan Zhu
Auto-TLDR; Distilled Learning Framework for Siamese Tracking
Abstract Slides Poster Similar
Visual Object Tracking in Drone Images with Deep Reinforcement Learning

Auto-TLDR; A Deep Reinforcement Learning based Single Object Tracker for Drone Applications
Abstract Slides Poster Similar
Robust Visual Object Tracking with Two-Stream Residual Convolutional Networks
Ning Zhang, Jingen Liu, Ke Wang, Dan Zeng, Tao Mei

Auto-TLDR; Two-Stream Residual Convolutional Network for Visual Tracking
Abstract Slides Poster Similar
MFST: Multi-Features Siamese Tracker
Zhenxi Li, Guillaume-Alexandre Bilodeau, Wassim Bouachir
Auto-TLDR; Multi-Features Siamese Tracker for Robust Deep Similarity Tracking
Siamese Dynamic Mask Estimation Network for Fast Video Object Segmentation
Dexiang Hong, Guorong Li, Kai Xu, Li Su, Qingming Huang

Auto-TLDR; Siamese Dynamic Mask Estimation for Video Object Segmentation
Abstract Slides Poster Similar
SiamMT: Real-Time Arbitrary Multi-Object Tracking
Lorenzo Vaquero, Manuel Mucientes, Victor Brea

Auto-TLDR; SiamMT: A Deep-Learning-based Arbitrary Multi-Object Tracking System for Video
Abstract Slides Poster Similar
AerialMPTNet: Multi-Pedestrian Tracking in Aerial Imagery Using Temporal and Graphical Features
Maximilian Kraus, Seyed Majid Azimi, Emec Ercelik, Reza Bahmanyar, Peter Reinartz, Alois Knoll

Auto-TLDR; AerialMPTNet: A novel approach for multi-pedestrian tracking in geo-referenced aerial imagery by fusing appearance features
Abstract Slides Poster Similar
Adaptive Context-Aware Discriminative Correlation Filters for Robust Visual Object Tracking
Tianyang Xu, Zhenhua Feng, Xiaojun Wu, Josef Kittler
Auto-TLDR; ACA-DCF: Adaptive Context-Aware Discriminative Correlation Filter with complementary attention mechanisms
Abstract Slides Poster Similar
Tracking Fast Moving Objects by Segmentation Network

Auto-TLDR; Fast Moving Objects Tracking by Segmentation Using Deep Learning
Abstract Slides Poster Similar
Compact and Discriminative Multi-Object Tracking with Siamese CNNs
Claire Labit-Bonis, Jérôme Thomas, Frederic Lerasle

Auto-TLDR; Fast, Light-Weight and All-in-One Single Object Tracking for Multi-Target Management
Abstract Slides Poster Similar
An Adaptive Fusion Model Based on Kalman Filtering and LSTM for Fast Tracking of Road Signs
Chengliang Wang, Xin Xie, Chao Liao

Auto-TLDR; Fusion of ThunderNet and Region Growing Detector for Road Sign Detection and Tracking
Abstract Slides Poster Similar
SynDHN: Multi-Object Fish Tracker Trained on Synthetic Underwater Videos
Mygel Andrei Martija, Prospero Naval

Auto-TLDR; Underwater Multi-Object Tracking in the Wild with Deep Hungarian Network
Abstract Slides Poster Similar
Unsupervised Moving Object Detection through Background Models for PTZ Camera
Kimin Yun, Hyung-Il Kim, Kangmin Bae, Jongyoul Park
Auto-TLDR; Unsupervised Moving Object Detection in a PTZ Camera through Two Background Models
Abstract Slides Poster Similar
Visual Saliency Oriented Vehicle Scale Estimation
Qixin Chen, Tie Liu, Jiali Ding, Zejian Yuan, Yuanyuan Shang

Auto-TLDR; Regularized Intensity Matching for Vehicle Scale Estimation with salient object detection
Abstract Slides Poster Similar
Mobile Augmented Reality: Fast, Precise, and Smooth Planar Object Tracking
Dmitrii Matveichev, Daw-Tung Lin

Auto-TLDR; Planar Object Tracking with Sparse Optical Flow Tracking and Descriptor Matching
Abstract Slides Poster Similar
ACCLVOS: Atrous Convolution with Spatial-Temporal ConvLSTM for Video Object Segmentation
Muzhou Xu, Shan Zong, Chunping Liu, Shengrong Gong, Zhaohui Wang, Yu Xia
Auto-TLDR; Semi-supervised Video Object Segmentation using U-shape Convolution and ConvLSTM
Abstract Slides Poster Similar
DualBox: Generating BBox Pair with Strong Correspondence Via Occlusion Pattern Clustering and Proposal Refinement
Zheng Ge, Chuyu Hu, Xin Huang, Baiqiao Qiu, Osamu Yoshie
Auto-TLDR; R2NMS: Combining Full and Visible Body Bounding Box for Dense Pedestrian Detection
Abstract Slides Poster Similar
MagnifierNet: Learning Efficient Small-Scale Pedestrian Detector towards Multiple Dense Regions
Qi Cheng, Mingqin Chen, Yingjie Wu, Fei Chen, Shiping Lin

Auto-TLDR; MagnifierNet: A Simple but Effective Small-Scale Pedestrian Detection Towards Multiple Dense Regions
Abstract Slides Poster Similar
Mutual-Supervised Feature Modulation Network for Occluded Pedestrian Detection
Auto-TLDR; A Mutual-Supervised Feature Modulation Network for Occluded Pedestrian Detection
IPT: A Dataset for Identity Preserved Tracking in Closed Domains
Thomas Heitzinger, Martin Kampel

Auto-TLDR; Identity Preserved Tracking Using Depth Data for Privacy and Privacy
Abstract Slides Poster Similar
Forground-Guided Vehicle Perception Framework
Kun Tian, Tong Zhou, Shiming Xiang, Chunhong Pan

Auto-TLDR; A foreground segmentation branch for vehicle detection
Abstract Slides Poster Similar
Motion and Region Aware Adversarial Learning for Fall Detection with Thermal Imaging
Vineet Mehta, Abhinav Dhall, Sujata Pal, Shehroz Khan
Auto-TLDR; Automatic Fall Detection with Adversarial Network using Thermal Imaging Camera
Abstract Slides Poster Similar
RLST: A Reinforcement Learning Approach to Scene Text Detection Refinement
Xuan Peng, Zheng Huang, Kai Chen, Jie Guo, Weidong Qiu
Auto-TLDR; Saccadic Eye Movements and Peripheral Vision for Scene Text Detection using Reinforcement Learning
Abstract Slides Poster Similar
Early Wildfire Smoke Detection in Videos
Taanya Gupta, Hengyue Liu, Bir Bhanu

Auto-TLDR; Semi-supervised Spatio-Temporal Video Object Segmentation for Automatic Detection of Smoke in Videos during Forest Fire
Learning Object Deformation and Motion Adaption for Semi-Supervised Video Object Segmentation
Xiaoyang Zheng, Xin Tan, Jianming Guo, Lizhuang Ma
Auto-TLDR; Semi-supervised Video Object Segmentation with Mask-propagation-based Model
Abstract Slides Poster Similar
Object Features and Face Detection Performance: Analyses with 3D-Rendered Synthetic Data
Jian Han, Sezer Karaoglu, Hoang-An Le, Theo Gevers
Auto-TLDR; Synthetic Data for Face Detection Using 3DU Face Dataset
Abstract Slides Poster Similar
Utilising Visual Attention Cues for Vehicle Detection and Tracking
Feiyan Hu, Venkatesh Gurram Munirathnam, Noel E O'Connor, Alan Smeaton, Suzanne Little

Auto-TLDR; Visual Attention for Object Detection and Tracking in Driver-Assistance Systems
Abstract Slides Poster Similar
Multi-Scale Keypoint Matching
Auto-TLDR; Multi-Scale Keypoint Matching Using Multi-Scale Information
Abstract Slides Poster Similar
Object Detection Model Based on Scene-Level Region Proposal Self-Attention
Yu Quan, Zhixin Li, Canlong Zhang, Huifang Ma
Auto-TLDR; Exploiting Semantic Informations for Object Detection
Abstract Slides Poster Similar
Coarse to Fine: Progressive and Multi-Task Learning for Salient Object Detection
Dong-Goo Kang, Sangwoo Park, Joonki Paik
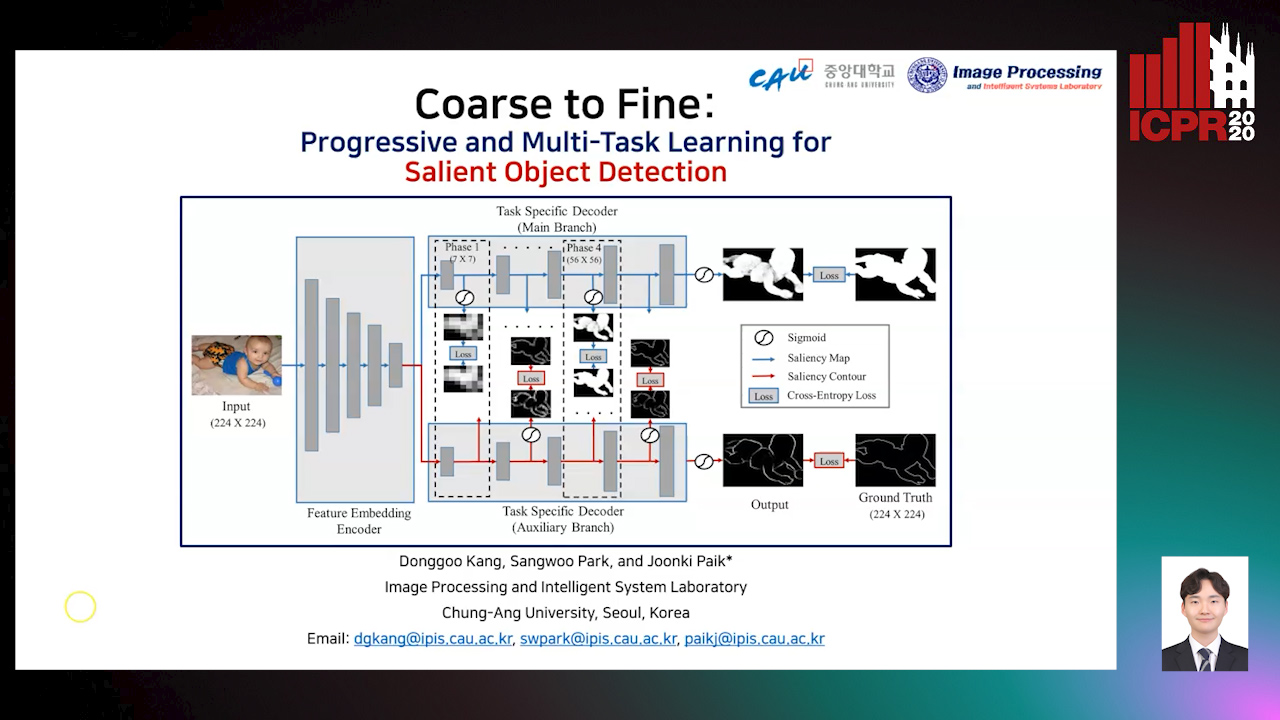
Auto-TLDR; Progressive and mutl-task learning scheme for salient object detection
Abstract Slides Poster Similar
SyNet: An Ensemble Network for Object Detection in UAV Images

Auto-TLDR; SyNet: Combining Multi-Stage and Single-Stage Object Detection for Aerial Images
Exploring Severe Occlusion: Multi-Person 3D Pose Estimation with Gated Convolution
Renshu Gu, Gaoang Wang, Jenq-Neng Hwang

Auto-TLDR; 3D Human Pose Estimation for Multi-Human Videos with Occlusion
SFPN: Semantic Feature Pyramid Network for Object Detection
Auto-TLDR; SFPN: Semantic Feature Pyramid Network to Address Information Dilution Issue in FPN
Abstract Slides Poster Similar
Precise Temporal Action Localization with Quantified Temporal Structure of Actions
Chongkai Lu, Ruimin Li, Hong Fu, Bin Fu, Yihao Wang, Wai Lun Lo, Zheru Chi
Auto-TLDR; Action progression networks for temporal action detection
Abstract Slides Poster Similar
Video Object Detection Using Object's Motion Context and Spatio-Temporal Feature Aggregation
Jaekyum Kim, Junho Koh, Byeongwon Lee, Seungji Yang, Jun Won Choi
Auto-TLDR; Video Object Detection Using Spatio-Temporal Aggregated Features and Gated Attention Network
Abstract Slides Poster Similar
Human Segmentation with Dynamic LiDAR Data
Tao Zhong, Wonjik Kim, Masayuki Tanaka, Masatoshi Okutomi

Auto-TLDR; Spatiotemporal Neural Network for Human Segmentation with Dynamic Point Clouds
Learning a Dynamic High-Resolution Network for Multi-Scale Pedestrian Detection
Mengyuan Ding, Shanshan Zhang, Jian Yang

Auto-TLDR; Learningable Dynamic HRNet for Pedestrian Detection
Abstract Slides Poster Similar
Temporal Feature Enhancement Network with External Memory for Object Detection in Surveillance Video
Masato Fujitake, Akihiro Sugimoto

Auto-TLDR; Temporal Attention Based External Memory Network for Surveillance Object Detection
Motion U-Net: Multi-Cue Encoder-Decoder Network for Motion Segmentation
Gani Rahmon, Filiz Bunyak, Kannappan Palaniappan

Auto-TLDR; Motion U-Net: A Deep Learning Framework for Robust Moving Object Detection under Challenging Conditions
Abstract Slides Poster Similar
Online Object Recognition Using CNN-Based Algorithm on High-Speed Camera Imaging
Shigeaki Namiki, Keiko Yokoyama, Shoji Yachida, Takashi Shibata, Hiroyoshi Miyano, Masatoshi Ishikawa
Auto-TLDR; Real-Time Object Recognition with High-Speed Camera Imaging with Population Data Clearing and Data Ensemble
Abstract Slides Poster Similar