Exploiting Distilled Learning for Deep Siamese Tracking
Chengxin Liu,
Zhiguo Cao,
Wei Li,
Yang Xiao,
Shuaiyuan Du,
Angfan Zhu
Auto-TLDR; Distilled Learning Framework for Siamese Tracking
Similar papers
RSINet: Rotation-Scale Invariant Network for Online Visual Tracking
Yang Fang, Geunsik Jo, Chang-Hee Lee

Auto-TLDR; RSINet: Rotation-Scale Invariant Network for Adaptive Tracking
Abstract Slides Poster Similar
MFST: Multi-Features Siamese Tracker
Zhenxi Li, Guillaume-Alexandre Bilodeau, Wassim Bouachir
Auto-TLDR; Multi-Features Siamese Tracker for Robust Deep Similarity Tracking
VTT: Long-Term Visual Tracking with Transformers
Tianling Bian, Yang Hua, Tao Song, Zhengui Xue, Ruhui Ma, Neil Robertson, Haibing Guan
Auto-TLDR; Visual Tracking Transformer with transformers for long-term visual tracking
Tackling Occlusion in Siamese Tracking with Structured Dropouts
Deepak Gupta, Efstratios Gavves, Arnold Smeulders
Auto-TLDR; Structured Dropout for Occlusion in latent space
Abstract Slides Poster Similar
SiamMT: Real-Time Arbitrary Multi-Object Tracking
Lorenzo Vaquero, Manuel Mucientes, Victor Brea

Auto-TLDR; SiamMT: A Deep-Learning-based Arbitrary Multi-Object Tracking System for Video
Abstract Slides Poster Similar
Model Decay in Long-Term Tracking
Efstratios Gavves, Ran Tao, Deepak Gupta, Arnold Smeulders
Auto-TLDR; Model Bias in Long-Term Tracking
Abstract Slides Poster Similar
TSDM: Tracking by SiamRPN++ with a Depth-Refiner and a Mask-Generator
Pengyao Zhao, Quanli Liu, Wei Wang, Qiang Guo
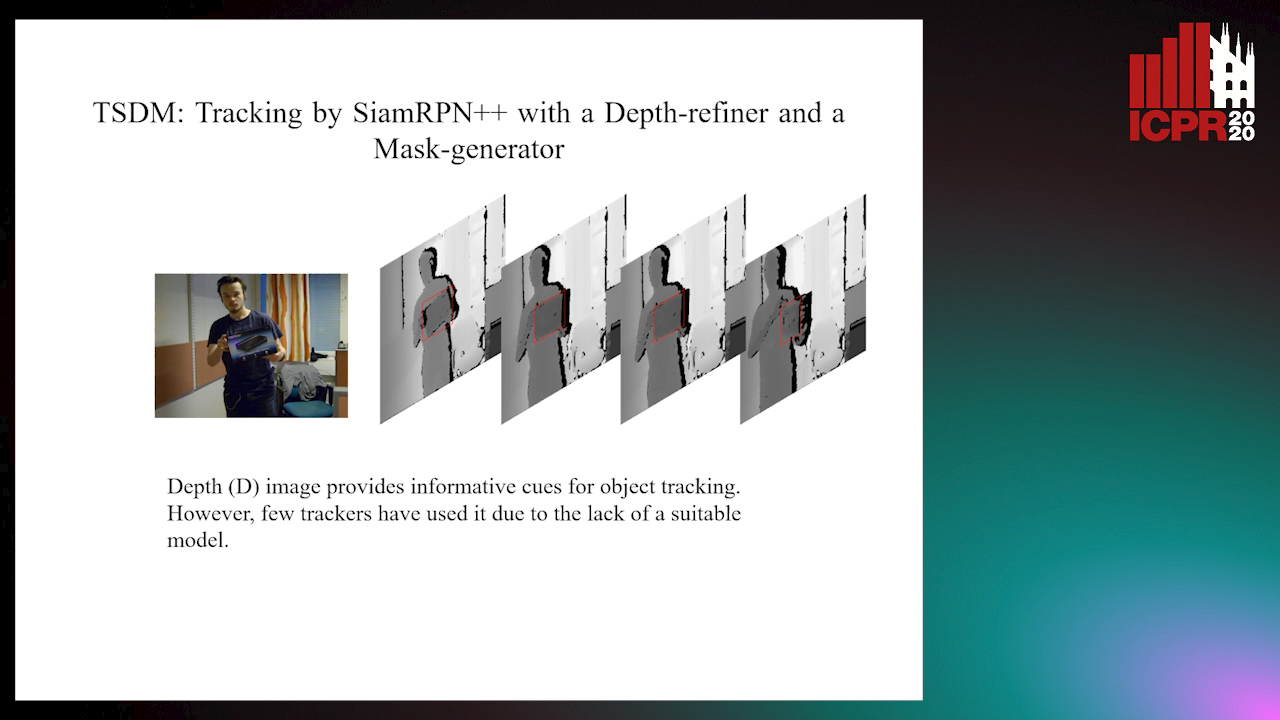
Auto-TLDR; TSDM: A Depth-D Tracker for 3D Object Tracking
Abstract Slides Poster Similar
Siamese Fully Convolutional Tracker with Motion Correction
Mathew Francis, Prithwijit Guha

Auto-TLDR; A Siamese Ensemble for Visual Tracking with Appearance and Motion Components
Abstract Slides Poster Similar
DAL: A Deep Depth-Aware Long-Term Tracker
Yanlin Qian, Song Yan, Alan Lukežič, Matej Kristan, Joni-Kristian Kamarainen, Jiri Matas

Auto-TLDR; Deep Depth-Aware Long-Term RGBD Tracking with Deep Discriminative Correlation Filter
Abstract Slides Poster Similar
Robust Visual Object Tracking with Two-Stream Residual Convolutional Networks
Ning Zhang, Jingen Liu, Ke Wang, Dan Zeng, Tao Mei

Auto-TLDR; Two-Stream Residual Convolutional Network for Visual Tracking
Abstract Slides Poster Similar
Siamese Dynamic Mask Estimation Network for Fast Video Object Segmentation
Dexiang Hong, Guorong Li, Kai Xu, Li Su, Qingming Huang

Auto-TLDR; Siamese Dynamic Mask Estimation for Video Object Segmentation
Abstract Slides Poster Similar
Adaptive Context-Aware Discriminative Correlation Filters for Robust Visual Object Tracking
Tianyang Xu, Zhenhua Feng, Xiaojun Wu, Josef Kittler
Auto-TLDR; ACA-DCF: Adaptive Context-Aware Discriminative Correlation Filter with complementary attention mechanisms
Abstract Slides Poster Similar
Efficient Correlation Filter Tracking with Adaptive Training Sample Update Scheme
Shan Jiang, Shuxiao Li, Chengfei Zhu, Nan Yan
Auto-TLDR; Adaptive Training Sample Update Scheme of Correlation Filter Based Trackers for Visual Tracking
Abstract Slides Poster Similar
Reducing False Positives in Object Tracking with Siamese Network
Takuya Ogawa, Takashi Shibata, Shoji Yachida, Toshinori Hosoi
Auto-TLDR; Robust Long-Term Object Tracking with Adaptive Search based on Motion Models
Abstract Slides Poster Similar
Visual Object Tracking in Drone Images with Deep Reinforcement Learning

Auto-TLDR; A Deep Reinforcement Learning based Single Object Tracker for Drone Applications
Abstract Slides Poster Similar
Compact and Discriminative Multi-Object Tracking with Siamese CNNs
Claire Labit-Bonis, Jérôme Thomas, Frederic Lerasle

Auto-TLDR; Fast, Light-Weight and All-in-One Single Object Tracking for Multi-Target Management
Abstract Slides Poster Similar
A Boundary-Aware Distillation Network for Compressed Video Semantic Segmentation
Auto-TLDR; A Boundary-Aware Distillation Network for Video Semantic Segmentation
Abstract Slides Poster Similar
Utilising Visual Attention Cues for Vehicle Detection and Tracking
Feiyan Hu, Venkatesh Gurram Munirathnam, Noel E O'Connor, Alan Smeaton, Suzanne Little

Auto-TLDR; Visual Attention for Object Detection and Tracking in Driver-Assistance Systems
Abstract Slides Poster Similar
Neural Compression and Filtering for Edge-assisted Real-time Object Detection in Challenged Networks
Yoshitomo Matsubara, Marco Levorato
Auto-TLDR; Deep Neural Networks for Remote Object Detection Using Edge Computing
Abstract Slides Poster Similar
FastSal: A Computationally Efficient Network for Visual Saliency Prediction
Auto-TLDR; MobileNetV2: A Convolutional Neural Network for Saliency Prediction
Abstract Slides Poster Similar
SynDHN: Multi-Object Fish Tracker Trained on Synthetic Underwater Videos
Mygel Andrei Martija, Prospero Naval

Auto-TLDR; Underwater Multi-Object Tracking in the Wild with Deep Hungarian Network
Abstract Slides Poster Similar
Tracking Fast Moving Objects by Segmentation Network

Auto-TLDR; Fast Moving Objects Tracking by Segmentation Using Deep Learning
Abstract Slides Poster Similar
Compact CNN Structure Learning by Knowledge Distillation
Waqar Ahmed, Andrea Zunino, Pietro Morerio, Vittorio Murino
Auto-TLDR; Knowledge Distillation for Compressing Deep Convolutional Neural Networks
Abstract Slides Poster Similar
Efficient Online Subclass Knowledge Distillation for Image Classification
Maria Tzelepi, Nikolaos Passalis, Anastasios Tefas
Auto-TLDR; OSKD: Online Subclass Knowledge Distillation
Abstract Slides Poster Similar
Towards Low-Bit Quantization of Deep Neural Networks with Limited Data
Yong Yuan, Chen Chen, Xiyuan Hu, Silong Peng
Auto-TLDR; Low-Precision Quantization of Deep Neural Networks with Limited Data
Abstract Slides Poster Similar
Automatic Student Network Search for Knowledge Distillation
Zhexi Zhang, Wei Zhu, Junchi Yan, Peng Gao, Guotong Xie

Auto-TLDR; NAS-KD: Knowledge Distillation for BERT
Abstract Slides Poster Similar
Knowledge Distillation Beyond Model Compression
Fahad Sarfraz, Elahe Arani, Bahram Zonooz
Auto-TLDR; Knowledge Distillation from Teacher to Student
Abstract Slides Poster Similar
SFPN: Semantic Feature Pyramid Network for Object Detection
Auto-TLDR; SFPN: Semantic Feature Pyramid Network to Address Information Dilution Issue in FPN
Abstract Slides Poster Similar
Dynamic Multi-Path Neural Network
Yingcheng Su, Yichao Wu, Ken Chen, Ding Liang, Xiaolin Hu

Auto-TLDR; Dynamic Multi-path Neural Network
Forground-Guided Vehicle Perception Framework
Kun Tian, Tong Zhou, Shiming Xiang, Chunhong Pan

Auto-TLDR; A foreground segmentation branch for vehicle detection
Abstract Slides Poster Similar
Multi-Order Feature Statistical Model for Fine-Grained Visual Categorization
Qingtao Wang, Ke Zhang, Shaoli Huang, Lianbo Zhang, Jin Fan
Auto-TLDR; Multi-Order Feature Statistical Method for Fine-Grained Visual Categorization
Abstract Slides Poster Similar
Nighttime Pedestrian Detection Based on Feature Attention and Transformation
Gang Li, Shanshan Zhang, Jian Yang
Auto-TLDR; FAM and FTM: Enhanced Feature Attention Module and Feature Transformation Module for nighttime pedestrian detection
Abstract Slides Poster Similar
Teacher-Student Training and Triplet Loss for Facial Expression Recognition under Occlusion
Mariana-Iuliana Georgescu, Radu Ionescu
Auto-TLDR; Knowledge Distillation for Facial Expression Recognition under Occlusion
Object Detection Model Based on Scene-Level Region Proposal Self-Attention
Yu Quan, Zhixin Li, Canlong Zhang, Huifang Ma
Auto-TLDR; Exploiting Semantic Informations for Object Detection
Abstract Slides Poster Similar
AerialMPTNet: Multi-Pedestrian Tracking in Aerial Imagery Using Temporal and Graphical Features
Maximilian Kraus, Seyed Majid Azimi, Emec Ercelik, Reza Bahmanyar, Peter Reinartz, Alois Knoll

Auto-TLDR; AerialMPTNet: A novel approach for multi-pedestrian tracking in geo-referenced aerial imagery by fusing appearance features
Abstract Slides Poster Similar
Distilling Spikes: Knowledge Distillation in Spiking Neural Networks
Ravi Kumar Kushawaha, Saurabh Kumar, Biplab Banerjee, Rajbabu Velmurugan
Auto-TLDR; Knowledge Distillation in Spiking Neural Networks for Image Classification
Abstract Slides Poster Similar
Channel Planting for Deep Neural Networks Using Knowledge Distillation
Kakeru Mitsuno, Yuichiro Nomura, Takio Kurita
Auto-TLDR; Incremental Training for Deep Neural Networks with Knowledge Distillation
Abstract Slides Poster Similar
Knowledge Distillation with a Precise Teacher and Prediction with Abstention
Auto-TLDR; Knowledge Distillation using Deep gambler loss and selective classification framework
Abstract Slides Poster Similar
Temporal Feature Enhancement Network with External Memory for Object Detection in Surveillance Video
Masato Fujitake, Akihiro Sugimoto

Auto-TLDR; Temporal Attention Based External Memory Network for Surveillance Object Detection
Feature Fusion for Online Mutual Knowledge Distillation
Jangho Kim, Minsung Hyun, Inseop Chung, Nojun Kwak
Auto-TLDR; Feature Fusion Learning Using Fusion of Sub-Networks
Abstract Slides Poster Similar
Second-Order Attention Guided Convolutional Activations for Visual Recognition
Shannan Chen, Qian Wang, Qiule Sun, Bin Liu, Jianxin Zhang, Qiang Zhang

Auto-TLDR; Second-order Attention Guided Network for Convolutional Neural Networks for Visual Recognition
Abstract Slides Poster Similar
Rethinking of Deep Models Parameters with Respect to Data Distribution
Shitala Prasad, Dongyun Lin, Yiqun Li, Sheng Dong, Zaw Min Oo

Auto-TLDR; A progressive stepwise training strategy for deep neural networks
Abstract Slides Poster Similar
Fast and Accurate Real-Time Semantic Segmentation with Dilated Asymmetric Convolutions
Leonel Rosas-Arias, Gibran Benitez-Garcia, Jose Portillo-Portillo, Gabriel Sanchez-Perez, Keiji Yanai

Auto-TLDR; FASSD-Net: Dilated Asymmetric Pyramidal Fusion for Real-Time Semantic Segmentation
Abstract Slides Poster Similar
Video Object Detection Using Object's Motion Context and Spatio-Temporal Feature Aggregation
Jaekyum Kim, Junho Koh, Byeongwon Lee, Seungji Yang, Jun Won Choi
Auto-TLDR; Video Object Detection Using Spatio-Temporal Aggregated Features and Gated Attention Network
Abstract Slides Poster Similar
Detective: An Attentive Recurrent Model for Sparse Object Detection
Amine Kechaou, Manuel Martinez, Monica Haurilet, Rainer Stiefelhagen

Auto-TLDR; Detective: An attentive object detector that identifies objects in images in a sequential manner
Abstract Slides Poster Similar
Learning a Dynamic High-Resolution Network for Multi-Scale Pedestrian Detection
Mengyuan Ding, Shanshan Zhang, Jian Yang

Auto-TLDR; Learningable Dynamic HRNet for Pedestrian Detection
Abstract Slides Poster Similar
Dual-Attention Guided Dropblock Module for Weakly Supervised Object Localization
Junhui Yin, Siqing Zhang, Dongliang Chang, Zhanyu Ma, Jun Guo
Auto-TLDR; Dual-Attention Guided Dropblock for Weakly Supervised Object Localization
Abstract Slides Poster Similar
VPU Specific CNNs through Neural Architecture Search
Ciarán Donegan, Hamza Yous, Saksham Sinha, Jonathan Byrne
Auto-TLDR; Efficient Convolutional Neural Networks for Edge Devices using Neural Architecture Search
Abstract Slides Poster Similar