Compact and Discriminative Multi-Object Tracking with Siamese CNNs
Claire Labit-Bonis,
Jérôme Thomas,
Frederic Lerasle

Auto-TLDR; Fast, Light-Weight and All-in-One Single Object Tracking for Multi-Target Management
Similar papers
SynDHN: Multi-Object Fish Tracker Trained on Synthetic Underwater Videos
Mygel Andrei Martija, Prospero Naval

Auto-TLDR; Underwater Multi-Object Tracking in the Wild with Deep Hungarian Network
Abstract Slides Poster Similar
SiamMT: Real-Time Arbitrary Multi-Object Tracking
Lorenzo Vaquero, Manuel Mucientes, Victor Brea

Auto-TLDR; SiamMT: A Deep-Learning-based Arbitrary Multi-Object Tracking System for Video
Abstract Slides Poster Similar
RSINet: Rotation-Scale Invariant Network for Online Visual Tracking
Yang Fang, Geunsik Jo, Chang-Hee Lee

Auto-TLDR; RSINet: Rotation-Scale Invariant Network for Adaptive Tracking
Abstract Slides Poster Similar
DAL: A Deep Depth-Aware Long-Term Tracker
Yanlin Qian, Song Yan, Alan Lukežič, Matej Kristan, Joni-Kristian Kamarainen, Jiri Matas

Auto-TLDR; Deep Depth-Aware Long-Term RGBD Tracking with Deep Discriminative Correlation Filter
Abstract Slides Poster Similar
AerialMPTNet: Multi-Pedestrian Tracking in Aerial Imagery Using Temporal and Graphical Features
Maximilian Kraus, Seyed Majid Azimi, Emec Ercelik, Reza Bahmanyar, Peter Reinartz, Alois Knoll

Auto-TLDR; AerialMPTNet: A novel approach for multi-pedestrian tracking in geo-referenced aerial imagery by fusing appearance features
Abstract Slides Poster Similar
Robust Visual Object Tracking with Two-Stream Residual Convolutional Networks
Ning Zhang, Jingen Liu, Ke Wang, Dan Zeng, Tao Mei

Auto-TLDR; Two-Stream Residual Convolutional Network for Visual Tracking
Abstract Slides Poster Similar
Model Decay in Long-Term Tracking
Efstratios Gavves, Ran Tao, Deepak Gupta, Arnold Smeulders
Auto-TLDR; Model Bias in Long-Term Tracking
Abstract Slides Poster Similar
Siamese Fully Convolutional Tracker with Motion Correction
Mathew Francis, Prithwijit Guha

Auto-TLDR; A Siamese Ensemble for Visual Tracking with Appearance and Motion Components
Abstract Slides Poster Similar
TSDM: Tracking by SiamRPN++ with a Depth-Refiner and a Mask-Generator
Pengyao Zhao, Quanli Liu, Wei Wang, Qiang Guo
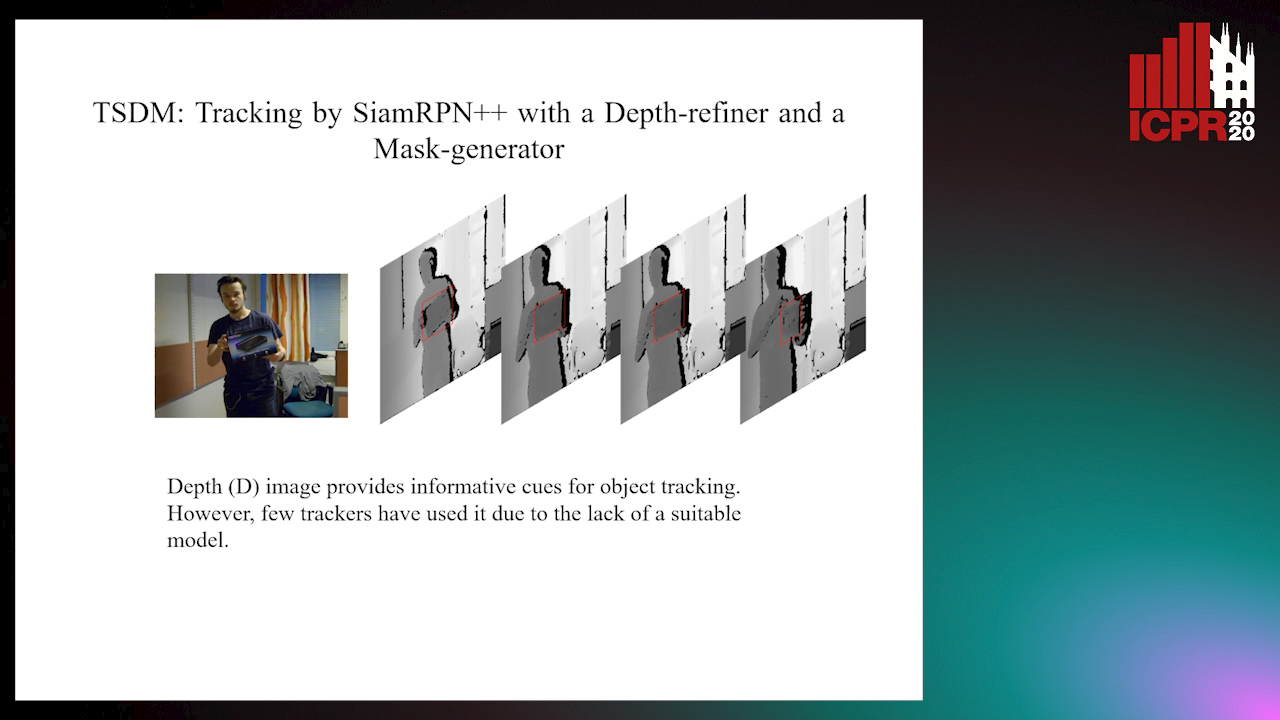
Auto-TLDR; TSDM: A Depth-D Tracker for 3D Object Tracking
Abstract Slides Poster Similar
Tackling Occlusion in Siamese Tracking with Structured Dropouts
Deepak Gupta, Efstratios Gavves, Arnold Smeulders
Auto-TLDR; Structured Dropout for Occlusion in latent space
Abstract Slides Poster Similar
An Adaptive Fusion Model Based on Kalman Filtering and LSTM for Fast Tracking of Road Signs
Chengliang Wang, Xin Xie, Chao Liao

Auto-TLDR; Fusion of ThunderNet and Region Growing Detector for Road Sign Detection and Tracking
Abstract Slides Poster Similar
IPT: A Dataset for Identity Preserved Tracking in Closed Domains
Thomas Heitzinger, Martin Kampel

Auto-TLDR; Identity Preserved Tracking Using Depth Data for Privacy and Privacy
Abstract Slides Poster Similar
From Certain to Uncertain: Toward Optimal Solution for Offline Multiple Object Tracking
Kaikai Zhao, Takashi Imaseki, Hiroshi Mouri, Einoshin Suzuki, Tetsu Matsukawa
Auto-TLDR; Agglomerative Hierarchical Clustering with Ensemble of Tracking Experts for Object Tracking
Abstract Slides Poster Similar
VTT: Long-Term Visual Tracking with Transformers
Tianling Bian, Yang Hua, Tao Song, Zhengui Xue, Ruhui Ma, Neil Robertson, Haibing Guan
Auto-TLDR; Visual Tracking Transformer with transformers for long-term visual tracking
Siamese Dynamic Mask Estimation Network for Fast Video Object Segmentation
Dexiang Hong, Guorong Li, Kai Xu, Li Su, Qingming Huang

Auto-TLDR; Siamese Dynamic Mask Estimation for Video Object Segmentation
Abstract Slides Poster Similar
MFST: Multi-Features Siamese Tracker
Zhenxi Li, Guillaume-Alexandre Bilodeau, Wassim Bouachir
Auto-TLDR; Multi-Features Siamese Tracker for Robust Deep Similarity Tracking
Exploiting Distilled Learning for Deep Siamese Tracking
Chengxin Liu, Zhiguo Cao, Wei Li, Yang Xiao, Shuaiyuan Du, Angfan Zhu
Auto-TLDR; Distilled Learning Framework for Siamese Tracking
Abstract Slides Poster Similar
Visual Object Tracking in Drone Images with Deep Reinforcement Learning

Auto-TLDR; A Deep Reinforcement Learning based Single Object Tracker for Drone Applications
Abstract Slides Poster Similar
Tracking Fast Moving Objects by Segmentation Network

Auto-TLDR; Fast Moving Objects Tracking by Segmentation Using Deep Learning
Abstract Slides Poster Similar
Reducing False Positives in Object Tracking with Siamese Network
Takuya Ogawa, Takashi Shibata, Shoji Yachida, Toshinori Hosoi
Auto-TLDR; Robust Long-Term Object Tracking with Adaptive Search based on Motion Models
Abstract Slides Poster Similar
Utilising Visual Attention Cues for Vehicle Detection and Tracking
Feiyan Hu, Venkatesh Gurram Munirathnam, Noel E O'Connor, Alan Smeaton, Suzanne Little

Auto-TLDR; Visual Attention for Object Detection and Tracking in Driver-Assistance Systems
Abstract Slides Poster Similar
Efficient Correlation Filter Tracking with Adaptive Training Sample Update Scheme
Shan Jiang, Shuxiao Li, Chengfei Zhu, Nan Yan
Auto-TLDR; Adaptive Training Sample Update Scheme of Correlation Filter Based Trackers for Visual Tracking
Abstract Slides Poster Similar
Multi-Level Deep Learning Vehicle Re-Identification Using Ranked-Based Loss Functions
Eleni Kamenou, Jesus Martinez-Del-Rincon, Paul Miller, Patricia Devlin - Hill
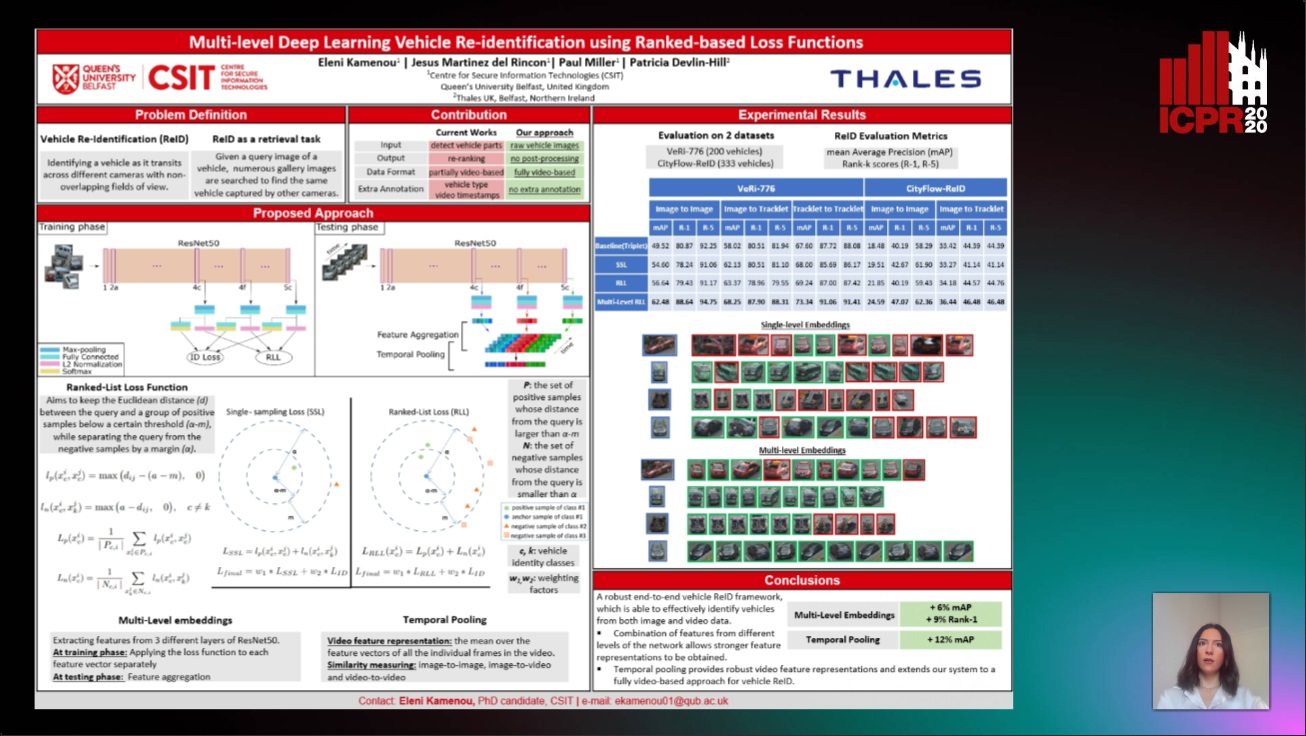
Auto-TLDR; Multi-Level Re-identification Network for Vehicle Re-Identification
Abstract Slides Poster Similar
FeatureNMS: Non-Maximum Suppression by Learning Feature Embeddings

Auto-TLDR; FeatureNMS: Non-Maximum Suppression for Multiple Object Detection
Abstract Slides Poster Similar
Correlation-Based ConvNet for Small Object Detection in Videos
Brais Bosquet, Manuel Mucientes, Victor Brea
Auto-TLDR; STDnet-ST: An End-to-End Spatio-Temporal Convolutional Neural Network for Small Object Detection in Video
Abstract Slides Poster Similar
Detective: An Attentive Recurrent Model for Sparse Object Detection
Amine Kechaou, Manuel Martinez, Monica Haurilet, Rainer Stiefelhagen

Auto-TLDR; Detective: An attentive object detector that identifies objects in images in a sequential manner
Abstract Slides Poster Similar
Transformer Networks for Trajectory Forecasting
Francesco Giuliari, Hasan Irtiza, Marco Cristani, Fabio Galasso
Auto-TLDR; TransformerNetworks for Trajectory Prediction of People Interactions
Abstract Slides Poster Similar
PolyLaneNet: Lane Estimation Via Deep Polynomial Regression
Talles Torres, Rodrigo Berriel, Thiago Paixão, Claudine Badue, Alberto F. De Souza, Thiago Oliveira-Santos
Auto-TLDR; Real-Time Lane Detection with Deep Polynomial Regression
Abstract Slides Poster Similar
Adaptive Context-Aware Discriminative Correlation Filters for Robust Visual Object Tracking
Tianyang Xu, Zhenhua Feng, Xiaojun Wu, Josef Kittler
Auto-TLDR; ACA-DCF: Adaptive Context-Aware Discriminative Correlation Filter with complementary attention mechanisms
Abstract Slides Poster Similar
An Empirical Analysis of Visual Features for Multiple Object Tracking in Urban Scenes
Mehdi Miah, Justine Pepin, Nicolas Saunier, Guillaume-Alexandre Bilodeau
Auto-TLDR; Evaluating Appearance Features for Multiple Object Tracking in Urban Scenes
Abstract Slides Poster Similar
Mobile Augmented Reality: Fast, Precise, and Smooth Planar Object Tracking
Dmitrii Matveichev, Daw-Tung Lin

Auto-TLDR; Planar Object Tracking with Sparse Optical Flow Tracking and Descriptor Matching
Abstract Slides Poster Similar
Not 3D Re-ID: Simple Single Stream 2D Convolution for Robust Video Re-Identification
Auto-TLDR; ResNet50-IBN for Video-based Person Re-Identification using Single Stream 2D Convolution Network
Abstract Slides Poster Similar
Light3DPose: Real-Time Multi-Person 3D Pose Estimation from Multiple Views
Alessio Elmi, Davide Mazzini, Pietro Tortella

Auto-TLDR; 3D Pose Estimation of Multiple People from a Few calibrated Camera Views using Deep Learning
Abstract Slides Poster Similar
FC-DCNN: A Densely Connected Neural Network for Stereo Estimation
Dominik Hirner, Friedrich Fraundorfer

Auto-TLDR; FC-DCNN: A Lightweight Network for Stereo Estimation
Abstract Slides Poster Similar
Object Segmentation Tracking from Generic Video Cues
Amirhossein Kardoost, Sabine Müller, Joachim Weickert, Margret Keuper

Auto-TLDR; A Light-Weight Variational Framework for Video Object Segmentation in Videos
Abstract Slides Poster Similar
Domain Siamese CNNs for Sparse Multispectral Disparity Estimation
David-Alexandre Beaupre, Guillaume-Alexandre Bilodeau

Auto-TLDR; Multispectral Disparity Estimation between Thermal and Visible Images using Deep Neural Networks
Abstract Slides Poster Similar
ACRM: Attention Cascade R-CNN with Mix-NMS for Metallic Surface Defect Detection
Junting Fang, Xiaoyang Tan, Yuhui Wang

Auto-TLDR; Attention Cascade R-CNN with Mix Non-Maximum Suppression for Robust Metal Defect Detection
Abstract Slides Poster Similar
Multi-View Object Detection Using Epipolar Constraints within Cluttered X-Ray Security Imagery
Brian Kostadinov Shalon Isaac-Medina, Chris G. Willcocks, Toby Breckon

Auto-TLDR; Exploiting Epipolar Constraints for Multi-View Object Detection in X-ray Security Images
Abstract Slides Poster Similar
Mutual-Supervised Feature Modulation Network for Occluded Pedestrian Detection
Auto-TLDR; A Mutual-Supervised Feature Modulation Network for Occluded Pedestrian Detection
Automated Whiteboard Lecture Video Summarization by Content Region Detection and Representation
Bhargava Urala Kota, Alexander Stone, Kenny Davila, Srirangaraj Setlur, Venu Govindaraju
Auto-TLDR; A Framework for Summarizing Whiteboard Lecture Videos Using Feature Representations of Handwritten Content Regions
HPERL: 3D Human Pose Estimastion from RGB and LiDAR
Michael Fürst, Shriya T.P. Gupta, René Schuster, Oliver Wasenmüler, Didier Stricker

Auto-TLDR; 3D Human Pose Estimation Using RGB and LiDAR Using Weakly-Supervised Approach
Abstract Slides Poster Similar
Video Anomaly Detection by Estimating Likelihood of Representations
Auto-TLDR; Video Anomaly Detection in the latent feature space using a deep probabilistic model
Abstract Slides Poster Similar
Learning Object Deformation and Motion Adaption for Semi-Supervised Video Object Segmentation
Xiaoyang Zheng, Xin Tan, Jianming Guo, Lizhuang Ma
Auto-TLDR; Semi-supervised Video Object Segmentation with Mask-propagation-based Model
Abstract Slides Poster Similar
Video Object Detection Using Object's Motion Context and Spatio-Temporal Feature Aggregation
Jaekyum Kim, Junho Koh, Byeongwon Lee, Seungji Yang, Jun Won Choi
Auto-TLDR; Video Object Detection Using Spatio-Temporal Aggregated Features and Gated Attention Network
Abstract Slides Poster Similar
Video Face Manipulation Detection through Ensemble of CNNs
Nicolo Bonettini, Edoardo Daniele Cannas, Sara Mandelli, Luca Bondi, Paolo Bestagini, Stefano Tubaro
Auto-TLDR; Face Manipulation Detection in Video Sequences Using Convolutional Neural Networks
Building Computationally Efficient and Well-Generalizing Person Re-Identification Models with Metric Learning
Vladislav Sovrasov, Dmitry Sidnev
Auto-TLDR; Cross-Domain Generalization in Person Re-identification using Omni-Scale Network
An Adaptive Video-To-Video Face Identification System Based on Self-Training
Eric Lopez-Lopez, Carlos V. Regueiro, Xosé M. Pardo

Auto-TLDR; Adaptive Video-to-Video Face Recognition using Dynamic Ensembles of SVM's
Abstract Slides Poster Similar
SSDL: Self-Supervised Domain Learning for Improved Face Recognition
Samadhi Poornima Kumarasinghe Wickrama Arachchilage, Ebroul Izquierdo
Auto-TLDR; Self-supervised Domain Learning for Face Recognition in unconstrained environments
Abstract Slides Poster Similar