Visibility Restoration in Infra-Red Images
Olivier Fourt,
Jean-Philippe Tarel
Auto-TLDR; Single Image Defogging for Long-Wavelength Infra-Red (LWIR)
Similar papers
Near-Infrared Depth-Independent Image Dehazing using Haar Wavelets
Sumit Laha, Ankit Sharma, Shengnan Hu, Hassan Foroosh
Auto-TLDR; A fusion algorithm for haze removal using Haar wavelets
Abstract Slides Poster Similar
Fast Region-Adaptive Defogging and Enhancement for Outdoor Images Containing Sky
Zhan Li, Xiaopeng Zheng, Bir Bhanu, Shun Long, Qingfeng Zhang, Zhenghao Huang

Auto-TLDR; Image defogging and enhancement of hazy outdoor scenes using region-adaptive segmentation and region-ratio-based adaptive Gamma correction
Abstract Slides Poster Similar
Towards Artifacts-Free Image Defogging
Gabriele Graffieti, Davide Maltoni
Auto-TLDR; CurL-Defog: Learning Based Defogging with CycleGAN and HArD
Thermal Image Enhancement Using Generative Adversarial Network for Pedestrian Detection
Mohamed Amine Marnissi, Hajer Fradi, Anis Sahbani, Najoua Essoukri Ben Amara
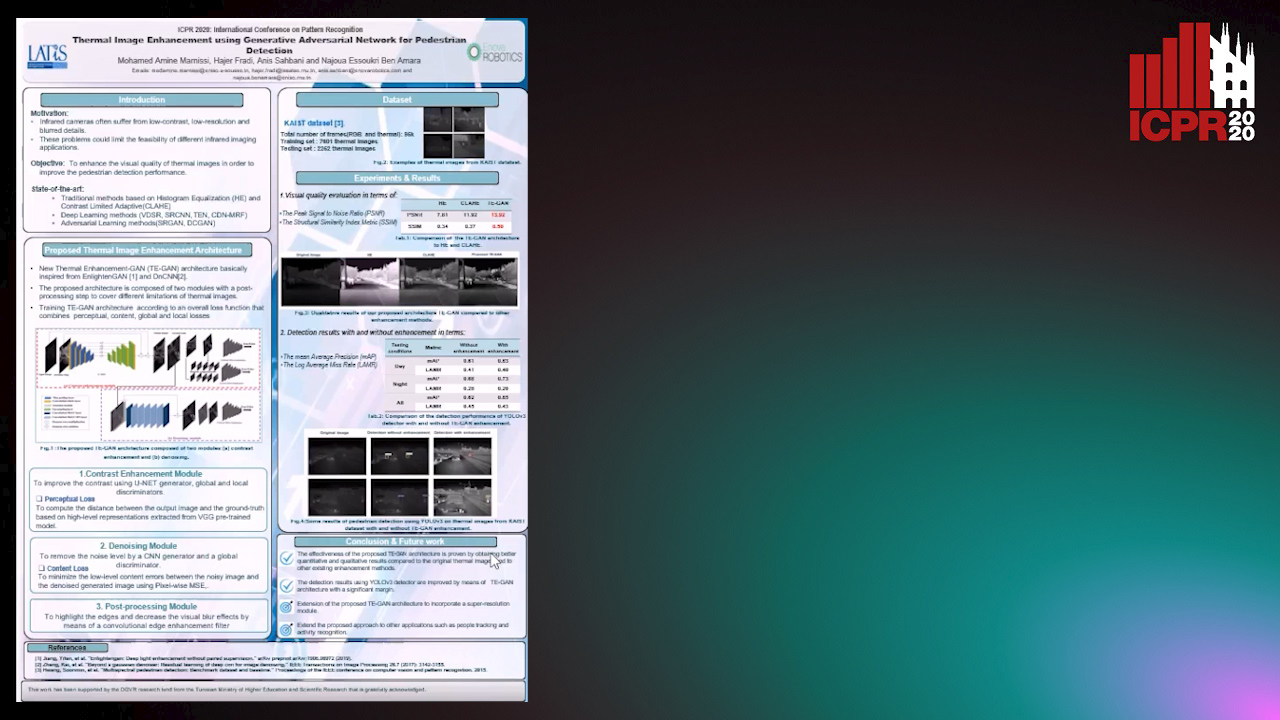
Auto-TLDR; Improving Visual Quality of Infrared Images for Pedestrian Detection Using Generative Adversarial Network
Abstract Slides Poster Similar
P2D: A Self-Supervised Method for Depth Estimation from Polarimetry
Marc Blanchon, Desire Sidibe, Olivier Morel, Ralph Seulin, Daniel Braun, Fabrice Meriaudeau

Auto-TLDR; Polarimetric Regularization for Monocular Depth Estimation
Abstract Slides Poster Similar
SIDGAN: Single Image Dehazing without Paired Supervision
Pan Wei, Xin Wang, Lei Wang, Ji Xiang, Zihan Wang
Auto-TLDR; DehazeGAN: An End-to-End Generative Adversarial Network for Image Dehazing
Abstract Slides Poster Similar
Real-Time Drone Detection and Tracking with Visible, Thermal and Acoustic Sensors
Fredrik Svanström, Cristofer Englund, Fernando Alonso-Fernandez
Auto-TLDR; Automatic multi-sensor drone detection using sensor fusion
Abstract Slides Poster Similar
Deep Fusion of RGB and NIR Paired Images Using Convolutional Neural Networks

Auto-TLDR; Deep Fusion of RGB and NIR paired images in low light condition using convolutional neural networks
Abstract Slides Poster Similar
Removing Raindrops from a Single Image Using Synthetic Data
Yoshihito Kokubo, Shusaku Asada, Hirotaka Maruyama, Masaru Koide, Kohei Yamamoto, Yoshihisa Suetsugu
Auto-TLDR; Raindrop Removal Using Synthetic Raindrop Data
Abstract Slides Poster Similar
Multimodal End-To-End Learning for Autonomous Steering in Adverse Road and Weather Conditions
Jyri Sakari Maanpää, Josef Taher, Petri Manninen, Leo Pakola, Iaroslav Melekhov, Juha Hyyppä

Auto-TLDR; End-to-End Learning for Autonomous Steering in Adverse Road and Weather Conditions with Lidar Data
Abstract Slides Poster Similar
A NoGAN Approach for Image and Video Restoration and Compression Artifact Removal
Mameli Filippo, Marco Bertini, Leonardo Galteri, Alberto Del Bimbo
Auto-TLDR; Deep Neural Network for Image and Video Compression Artifact Removal and Restoration
Hyperspectral Imaging for Analysis and Classification of Plastic Waste
Jakub Kraśniewski, Łukasz Dąbała, Lewandowski Marcin

Auto-TLDR; A Hyperspectral Camera for Material Classification
Abstract Slides Poster Similar
One Step Clustering Based on A-Contrario Framework for Detection of Alterations in Historical Violins
Alireza Rezaei, Sylvie Le Hégarat-Mascle, Emanuel Aldea, Piercarlo Dondi, Marco Malagodi

Auto-TLDR; A-Contrario Clustering for the Detection of Altered Violins using UVIFL Images
Abstract Slides Poster Similar
Polarimetric Image Augmentation
Marc Blanchon, Fabrice Meriaudeau, Olivier Morel, Ralph Seulin, Desire Sidibe

Auto-TLDR; Polarimetric Augmentation for Deep Learning in Robotics Applications
Video Lightening with Dedicated CNN Architecture
Li-Wen Wang, Wan-Chi Siu, Zhi-Song Liu, Chu-Tak Li, P. K. Daniel Lun
Auto-TLDR; VLN: Video Lightening Network for Driving Assistant Systems in Dark Environment
Abstract Slides Poster Similar
Automatical Enhancement and Denoising of Extremely Low-Light Images
Yuda Song, Yunfang Zhu, Xin Du
Auto-TLDR; INSNet: Illumination and Noise Separation Network for Low-Light Image Restoring
Abstract Slides Poster Similar
GraphBGS: Background Subtraction Via Recovery of Graph Signals
Jhony Heriberto Giraldo Zuluaga, Thierry Bouwmans
Auto-TLDR; Graph BackGround Subtraction using Graph Signals
Abstract Slides Poster Similar
Early Wildfire Smoke Detection in Videos
Taanya Gupta, Hengyue Liu, Bir Bhanu

Auto-TLDR; Semi-supervised Spatio-Temporal Video Object Segmentation for Automatic Detection of Smoke in Videos during Forest Fire
Domain Siamese CNNs for Sparse Multispectral Disparity Estimation
David-Alexandre Beaupre, Guillaume-Alexandre Bilodeau

Auto-TLDR; Multispectral Disparity Estimation between Thermal and Visible Images using Deep Neural Networks
Abstract Slides Poster Similar
Inner Eye Canthus Localization for Human Body Temperature Screening
Claudio Ferrari, Lorenzo Berlincioni, Marco Bertini, Alberto Del Bimbo
Auto-TLDR; Automatic Localization of the Inner Eye Canthus in Thermal Face Images using 3D Morphable Face Model
Abstract Slides Poster Similar
RONELD: Robust Neural Network Output Enhancement for Active Lane Detection
Zhe Ming Chng, Joseph Mun Hung Lew, Jimmy Addison Lee

Auto-TLDR; Real-Time Robust Neural Network Output Enhancement for Active Lane Detection
Abstract Slides Poster Similar
Learning Defects in Old Movies from Manually Assisted Restoration
Arthur Renaudeau, Travis Seng, Axel Carlier, Jean-Denis Durou, Fabien Pierre, Francois Lauze, Jean-François Aujol
Auto-TLDR; U-Net: Detecting Defects in Old Movies by Inpainting Techniques
Abstract Slides Poster Similar
Generic Document Image Dewarping by Probabilistic Discretization of Vanishing Points
Gilles Simon, Salvatore Tabbone
Auto-TLDR; Robust Document Dewarping using vanishing points
Abstract Slides Poster Similar
D3Net: Joint Demosaicking, Deblurring and Deringing
Tomas Kerepecky, Filip Sroubek
Auto-TLDR; Joint demosaicking deblurring and deringing network with light-weight architecture inspired by the alternating direction method of multipliers
DR2S: Deep Regression with Region Selection for Camera Quality Evaluation
Marcelin Tworski, Stéphane Lathuiliere, Salim Belkarfa, Attilio Fiandrotti, Marco Cagnazzo
Auto-TLDR; Texture Quality Estimation Using Deep Learning
Abstract Slides Poster Similar
Edge-Guided CNN for Denoising Images from Portable Ultrasound Devices
Yingnan Ma, Fei Yang, Anup Basu
Auto-TLDR; Edge-Guided Convolutional Neural Network for Portable Ultrasound Images
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
CARRADA Dataset: Camera and Automotive Radar with Range-Angle-Doppler Annotations
Arthur Ouaknine, Alasdair Newson, Julien Rebut, Florence Tupin, Patrick Pérez

Auto-TLDR; CARRADA: A dataset of synchronized camera and radar recordings with range-angle-Doppler annotations for autonomous driving
Abstract Slides Poster Similar
Approach for Document Detection by Contours and Contrasts
Daniil Tropin, Sergey Ilyuhin, Dmitry Nikolaev, Vladimir V. Arlazarov
Auto-TLDR; A countor-based method for arbitrary document detection on a mobile device
Abstract Slides Poster Similar
Enhancing Depth Quality of Stereo Vision Using Deep Learning-Based Prior Information of the Driving Environment
Weifu Li, Vijay John, Seiichi Mita
Auto-TLDR; A Novel Post-processing Mathematical Framework for Stereo Vision
Abstract Slides Poster Similar
Anomaly Detection, Localization and Classification for Railway Inspection
Riccardo Gasparini, Andrea D'Eusanio, Guido Borghi, Stefano Pini, Giuseppe Scaglione, Simone Calderara, Eugenio Fedeli, Rita Cucchiara

Auto-TLDR; Anomaly Detection and Localization using thermal images in the lowlight environment
DCT/IDCT Filter Design for Ultrasound Image Filtering
Barmak Honarvar Shakibaei Asli, Jan Flusser, Yifan Zhao, John Ahmet Erkoyuncu, Rajkumar Roy
Auto-TLDR; Finite impulse response digital filter using DCT-II and inverse DCT
Abstract Slides Poster Similar
Better Prior Knowledge Improves Human-Pose-Based Extrinsic Camera Calibration
Olivier Moliner, Sangxia Huang, Kalle Åström

Auto-TLDR; Improving Human-pose-based Extrinsic Calibration for Multi-Camera Systems
Abstract Slides Poster Similar
Deep Realistic Novel View Generation for City-Scale Aerial Images
Koundinya Nouduri, Ke Gao, Joshua Fraser, Shizeng Yao, Hadi Aliakbarpour, Filiz Bunyak, Kannappan Palaniappan
Auto-TLDR; End-to-End 3D Voxel Renderer for Multi-View Stereo Data Generation and Evaluation
Abstract Slides Poster Similar
Deep Universal Blind Image Denoising
Auto-TLDR; Image Denoising with Deep Convolutional Neural Networks
A Scalable Deep Neural Network to Detect Low Quality Images without a Reference
Auto-TLDR; A Deep Neural Network-based Algorithm for Non-reference Non-Reference Non-Referential Image Quality Metrics for Streaming Services
Abstract Slides Poster Similar
Extraction and Analysis of 3D Kinematic Parameters of Table Tennis Ball from a Single Camera
Jordan Calandre, Renaud Péteri, Laurent Mascarilla, Benoit Tremblais
Auto-TLDR; 3D Ball Trajectories Analysis using a Single Camera for Sport Gesture Analysis
Abstract Slides Poster Similar
Boundary Guided Image Translation for Pose Estimation from Ultra-Low Resolution Thermal Sensor
Kohei Kurihara, Tianren Wang, Teng Zhang, Brian Carrington Lovell
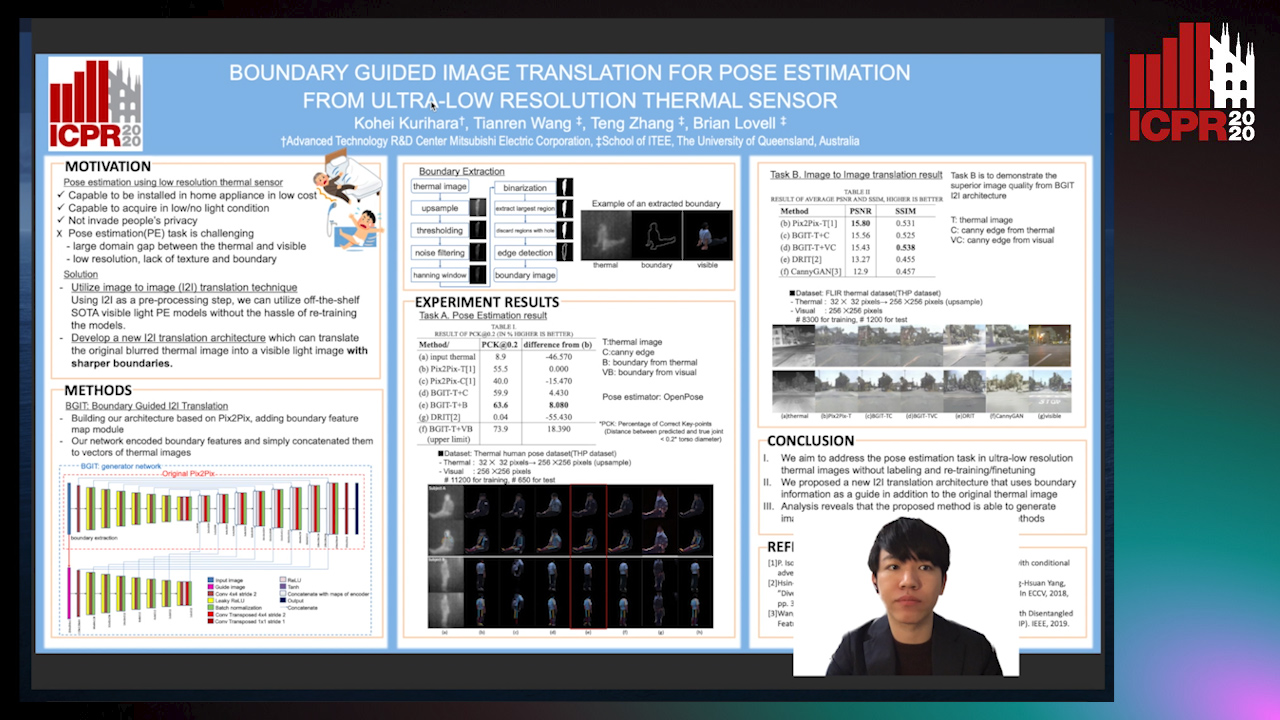
Auto-TLDR; Pose Estimation on Low-Resolution Thermal Images Using Image-to-Image Translation Architecture
Abstract Slides Poster Similar
Calibration and Absolute Pose Estimation of Trinocular Linear Camera Array for Smart City Applications
Martin Ahrnbom, Mikael Nilsson, Håkan Ardö, Kalle Åström, Oksana Yastremska-Kravchenko, Aliaksei Laureshyn

Auto-TLDR; Trinocular Linear Camera Array Calibration for Traffic Surveillance Applications
Abstract Slides Poster Similar
Holistic Grid Fusion Based Stop Line Estimation
Runsheng Xu, Faezeh Tafazzoli, Li Zhang, Timo Rehfeld, Gunther Krehl, Arunava Seal

Auto-TLDR; Fused Multi-Sensory Data for Stop Lines Detection in Intersection Scenarios
Visual Saliency Oriented Vehicle Scale Estimation
Qixin Chen, Tie Liu, Jiali Ding, Zejian Yuan, Yuanyuan Shang

Auto-TLDR; Regularized Intensity Matching for Vehicle Scale Estimation with salient object detection
Abstract Slides Poster Similar
Real-Time End-To-End Lane ID Estimation Using Recurrent Networks
Ibrahim Halfaoui, Fahd Bouzaraa, Onay Urfalioglu

Auto-TLDR; Real-Time, Vision-Only Lane Identification Using Monocular Camera
Abstract Slides Poster Similar
Electroencephalography Signal Processing Based on Textural Features for Monitoring the Driver’s State by a Brain-Computer Interface
Giulia Orrù, Marco Micheletto, Fabio Terranova, Gian Luca Marcialis

Auto-TLDR; One-dimensional Local Binary Pattern Algorithm for Estimating Driver Vigilance in a Brain-Computer Interface System
Abstract Slides Poster Similar
RISEdb: A Novel Indoor Localization Dataset
Carlos Sanchez Belenguer, Erik Wolfart, Álvaro Casado Coscollá, Vitor Sequeira

Auto-TLDR; Indoor Localization Using LiDAR SLAM and Smartphones: A Benchmarking Dataset
Abstract Slides Poster Similar
Multiple Future Prediction Leveraging Synthetic Trajectories
Lorenzo Berlincioni, Federico Becattini, Lorenzo Seidenari, Alberto Del Bimbo

Auto-TLDR; Synthetic Trajectory Prediction using Markov Chains
Abstract Slides Poster Similar
Visual Localization for Autonomous Driving: Mapping the Accurate Location in the City Maze
Dongfang Liu, Yiming Cui, Xiaolei Guo, Wei Ding, Baijian Yang, Yingjie Chen

Auto-TLDR; Feature Voting for Robust Visual Localization in Urban Settings
Abstract Slides Poster Similar
A Fine-Grained Dataset and Its Efficient Semantic Segmentation for Unstructured Driving Scenarios
Kai Andreas Metzger, Peter Mortimer, Hans J "Joe" Wuensche

Auto-TLDR; TAS500: A Semantic Segmentation Dataset for Autonomous Driving in Unstructured Environments
Abstract Slides Poster Similar
DSPNet: Deep Learning-Enabled Blind Reduction of Speckle Noise
Yuxu Lu, Meifang Yang, Liu Wen
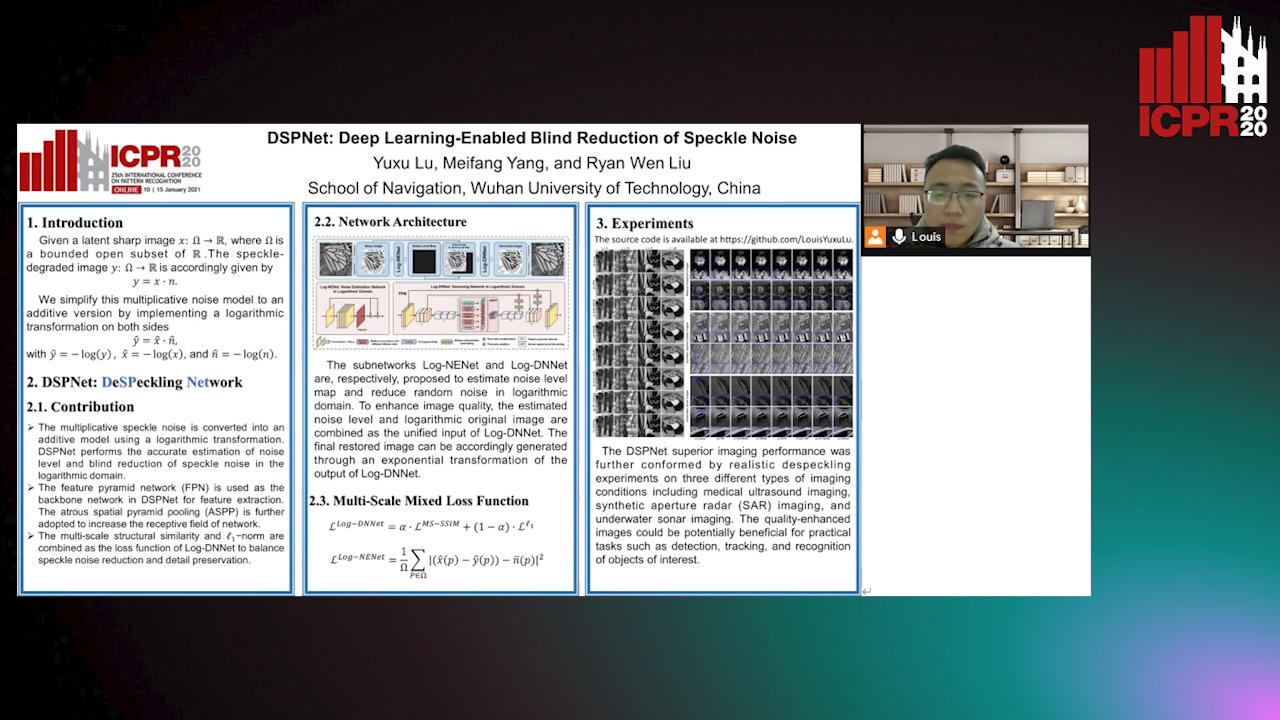
Auto-TLDR; Deep Blind DeSPeckling Network for Imaging Applications