Semantic Object Segmentation in Cultural Sites Using Real and Synthetic Data
Francesco Ragusa,
Daniele Di Mauro,
Alfio Palermo,
Antonino Furnari,
Giovanni Maria Farinella
Auto-TLDR; Exploiting Synthetic Data for Object Segmentation in Cultural Sites
Similar papers
Unsupervised Domain Adaptation for Object Detection in Cultural Sites
Giovanni Pasqualino, Antonino Furnari, Giovanni Maria Farinella
Auto-TLDR; Unsupervised Domain Adaptation for Object Detection in Cultural Sites
Unsupervised Domain Adaptation with Multiple Domain Discriminators and Adaptive Self-Training
Teo Spadotto, Marco Toldo, Umberto Michieli, Pietro Zanuttigh

Auto-TLDR; Unsupervised Domain Adaptation for Semantic Segmentation of Urban Scenes
Abstract Slides Poster Similar
On Embodied Visual Navigation in Real Environments through Habitat
Marco Rosano, Antonino Furnari, Luigi Gulino, Giovanni Maria Farinella

Auto-TLDR; Learning Navigation Policies on Real World Observations using Real World Images and Sensor and Actuation Noise
Abstract Slides Poster Similar
Cross-Domain Semantic Segmentation of Urban Scenes Via Multi-Level Feature Alignment
Bin Zhang, Shengjie Zhao, Rongqing Zhang
Auto-TLDR; Cross-Domain Semantic Segmentation Using Generative Adversarial Networks
Abstract Slides Poster Similar
Quantifying the Use of Domain Randomization
Mohammad Ani, Hector Basevi, Ales Leonardis
Auto-TLDR; Evaluating Domain Randomization for Synthetic Image Generation by directly measuring the difference between realistic and synthetic data distributions
Abstract Slides Poster Similar
Shape Consistent 2D Keypoint Estimation under Domain Shift
Levi Vasconcelos, Massimiliano Mancini, Davide Boscaini, Barbara Caputo, Elisa Ricci

Auto-TLDR; Deep Adaptation for Keypoint Prediction under Domain Shift
Abstract Slides Poster Similar
A Fine-Grained Dataset and Its Efficient Semantic Segmentation for Unstructured Driving Scenarios
Kai Andreas Metzger, Peter Mortimer, Hans J "Joe" Wuensche

Auto-TLDR; TAS500: A Semantic Segmentation Dataset for Autonomous Driving in Unstructured Environments
Abstract Slides Poster Similar
Unsupervised Multi-Task Domain Adaptation
Auto-TLDR; Unsupervised Domain Adaptation with Multi-task Learning for Image Recognition
Abstract Slides Poster Similar
A Simple Domain Shifting Network for Generating Low Quality Images
Guruprasad Hegde, Avinash Nittur Ramesh, Kanchana Vaishnavi Gandikota, Michael Möller, Roman Obermaisser
Auto-TLDR; Robotic Image Classification Using Quality degrading networks
Abstract Slides Poster Similar
Robust Pedestrian Detection in Thermal Imagery Using Synthesized Images
My Kieu, Lorenzo Berlincioni, Leonardo Galteri, Marco Bertini, Andrew Bagdanov, Alberto Del Bimbo

Auto-TLDR; Improving Pedestrian Detection in the thermal domain using Generative Adversarial Network
Abstract Slides Poster Similar
Efficient Shadow Detection and Removal Using Synthetic Data with Domain Adaptation
Rui Guo, Babajide Ayinde, Hao Sun
Auto-TLDR; Shadow Detection and Removal with Domain Adaptation and Synthetic Image Database
Foreground-Focused Domain Adaption for Object Detection
Auto-TLDR; Unsupervised Domain Adaptation for Unsupervised Object Detection
Rethinking Domain Generalization Baselines
Francesco Cappio Borlino, Antonio D'Innocente, Tatiana Tommasi
Auto-TLDR; Style Transfer Data Augmentation for Domain Generalization
Abstract Slides Poster Similar
Enhancing Semantic Segmentation of Aerial Images with Inhibitory Neurons
Ihsan Ullah, Sean Reilly, Michael Madden
Auto-TLDR; Lateral Inhibition in Deep Neural Networks for Object Recognition and Semantic Segmentation
Abstract Slides Poster Similar
Multiscale Attention-Based Prototypical Network for Few-Shot Semantic Segmentation
Yifei Zhang, Desire Sidibe, Olivier Morel, Fabrice Meriaudeau
Auto-TLDR; Few-shot Semantic Segmentation with Multiscale Feature Attention
EdgeNet: Semantic Scene Completion from a Single RGB-D Image
Aloisio Dourado, Teofilo De Campos, Adrian Hilton, Hansung Kim

Auto-TLDR; Semantic Scene Completion using 3D Depth and RGB Information
Abstract Slides Poster Similar
Towards Artifacts-Free Image Defogging
Gabriele Graffieti, Davide Maltoni
Auto-TLDR; CurL-Defog: Learning Based Defogging with CycleGAN and HArD
Future Urban Scenes Generation through Vehicles Synthesis
Alessandro Simoni, Luca Bergamini, Andrea Palazzi, Simone Calderara, Rita Cucchiara

Auto-TLDR; Predicting the Future of an Urban Scene with a Novel View Synthesis Paradigm
Abstract Slides Poster Similar
Level Three Synthetic Fingerprint Generation
Andre Wyzykowski, Mauricio Pamplona Segundo, Rubisley Lemes
Auto-TLDR; Synthesis of High-Resolution Fingerprints with Pore Detection Using CycleGAN
Abstract Slides Poster Similar
Joint Supervised and Self-Supervised Learning for 3D Real World Challenges
Antonio Alliegro, Davide Boscaini, Tatiana Tommasi

Auto-TLDR; Self-supervision for 3D Shape Classification and Segmentation in Point Clouds
Semi-Supervised Deep Learning Techniques for Spectrum Reconstruction
Adriano Simonetto, Vincent Parret, Alexander Gatto, Piergiorgio Sartor, Pietro Zanuttigh
Auto-TLDR; hyperspectral data estimation from RGB data using semi-supervised learning
Abstract Slides Poster Similar
Automatic Semantic Segmentation of Structural Elements related to the Spinal Cord in the Lumbar Region by Using Convolutional Neural Networks
Jhon Jairo Sáenz Gamboa, Maria De La Iglesia-Vaya, Jon Ander Gómez
Auto-TLDR; Semantic Segmentation of Lumbar Spine Using Convolutional Neural Networks
Abstract Slides Poster Similar
Text Recognition in Real Scenarios with a Few Labeled Samples
Jinghuang Lin, Cheng Zhanzhan, Fan Bai, Yi Niu, Shiliang Pu, Shuigeng Zhou
Auto-TLDR; Few-shot Adversarial Sequence Domain Adaptation for Scene Text Recognition
Abstract Slides Poster Similar
Video Semantic Segmentation Using Deep Multi-View Representation Learning
Akrem Sellami, Salvatore Tabbone

Auto-TLDR; Deep Multi-view Representation Learning for Video Object Segmentation
Abstract Slides Poster Similar
Incorporating Depth Information into Few-Shot Semantic Segmentation
Yifei Zhang, Desire Sidibe, Olivier Morel, Fabrice Meriaudeau

Auto-TLDR; RDNet: A Deep Neural Network for Few-shot Segmentation Using Depth Information
Abstract Slides Poster Similar
Learning Object Deformation and Motion Adaption for Semi-Supervised Video Object Segmentation
Xiaoyang Zheng, Xin Tan, Jianming Guo, Lizhuang Ma
Auto-TLDR; Semi-supervised Video Object Segmentation with Mask-propagation-based Model
Abstract Slides Poster Similar
Learning Low-Shot Generative Networks for Cross-Domain Data
Hsuan-Kai Kao, Cheng-Che Lee, Wei-Chen Chiu
Auto-TLDR; Learning Generators for Cross-Domain Data under Low-Shot Learning
Abstract Slides Poster Similar
Enhancing Deep Semantic Segmentation of RGB-D Data with Entangled Forests
Matteo Terreran, Elia Bonetto, Stefano Ghidoni

Auto-TLDR; FuseNet: A Lighter Deep Learning Model for Semantic Segmentation
Abstract Slides Poster Similar
DAPC: Domain Adaptation People Counting Via Style-Level Transfer Learning and Scene-Aware Estimation
Na Jiang, Xingsen Wen, Zhiping Shi
Auto-TLDR; Domain Adaptation People counting via Style-Level Transfer Learning and Scene-Aware Estimation
Abstract Slides Poster Similar
Tracking Fast Moving Objects by Segmentation Network

Auto-TLDR; Fast Moving Objects Tracking by Segmentation Using Deep Learning
Abstract Slides Poster Similar
Revisiting Sequence-To-Sequence Video Object Segmentation with Multi-Task Loss and Skip-Memory
Fatemeh Azimi, Benjamin Bischke, Sebastian Palacio, Federico Raue, Jörn Hees, Andreas Dengel

Auto-TLDR; Sequence-to-Sequence Learning for Video Object Segmentation
Abstract Slides Poster Similar
Manual-Label Free 3D Detection Via an Open-Source Simulator
Zhen Yang, Chi Zhang, Zhaoxiang Zhang, Huiming Guo

Auto-TLDR; DA-VoxelNet: A Novel Domain Adaptive VoxelNet for LIDAR-based 3D Object Detection
Abstract Slides Poster Similar
Iterative Bounding Box Annotation for Object Detection
Bishwo Adhikari, Heikki Juhani Huttunen
Auto-TLDR; Semi-Automatic Bounding Box Annotation for Object Detection in Digital Images
Abstract Slides Poster Similar
A GAN-Based Blind Inpainting Method for Masonry Wall Images
Yahya Ibrahim, Balázs Nagy, Csaba Benedek
Auto-TLDR; An End-to-End Blind Inpainting Algorithm for Masonry Wall Images
Abstract Slides Poster Similar
Weakly Supervised Body Part Segmentation with Pose Based Part Priors
Zhengyuan Yang, Yuncheng Li, Linjie Yang, Ning Zhang, Jiebo Luo
Auto-TLDR; Weakly Supervised Body Part Segmentation Using Weak Labels
3D Semantic Labeling of Photogrammetry Meshes Based on Active Learning
Mengqi Rong, Shuhan Shen, Zhanyi Hu

Auto-TLDR; 3D Semantic Expression of Urban Scenes Based on Active Learning
Abstract Slides Poster Similar
Early Wildfire Smoke Detection in Videos
Taanya Gupta, Hengyue Liu, Bir Bhanu

Auto-TLDR; Semi-supervised Spatio-Temporal Video Object Segmentation for Automatic Detection of Smoke in Videos during Forest Fire
SynDHN: Multi-Object Fish Tracker Trained on Synthetic Underwater Videos
Mygel Andrei Martija, Prospero Naval

Auto-TLDR; Underwater Multi-Object Tracking in the Wild with Deep Hungarian Network
Abstract Slides Poster Similar
Semantic-Guided Inpainting Network for Complex Urban Scenes Manipulation
Pierfrancesco Ardino, Yahui Liu, Elisa Ricci, Bruno Lepri, Marco De Nadai

Auto-TLDR; Semantic-Guided Inpainting of Complex Urban Scene Using Semantic Segmentation and Generation
Abstract Slides Poster Similar
Self-Training for Domain Adaptive Scene Text Detection
Yudi Chen, Wei Wang, Yu Zhou, Fei Yang, Dongbao Yang, Weiping Wang
Auto-TLDR; A self-training framework for image-based scene text detection
Detail Fusion GAN: High-Quality Translation for Unpaired Images with GAN-Based Data Augmentation
Ling Li, Yaochen Li, Chuan Wu, Hang Dong, Peilin Jiang, Fei Wang

Auto-TLDR; Data Augmentation with GAN-based Generative Adversarial Network
Abstract Slides Poster Similar
Machine-Learned Regularization and Polygonization of Building Segmentation Masks
Stefano Zorzi, Ksenia Bittner, Friedrich Fraundorfer

Auto-TLDR; Automatic Regularization and Polygonization of Building Segmentation masks using Generative Adversarial Network
Abstract Slides Poster Similar
Effective Deployment of CNNs for 3DoF Pose Estimation and Grasping in Industrial Settings
Daniele De Gregorio, Riccardo Zanella, Gianluca Palli, Luigi Di Stefano

Auto-TLDR; Automated Deep Learning for Robotic Grasping Applications
Abstract Slides Poster Similar
Galaxy Image Translation with Semi-Supervised Noise-Reconstructed Generative Adversarial Networks
Qiufan Lin, Dominique Fouchez, Jérôme Pasquet
Auto-TLDR; Semi-supervised Image Translation with Generative Adversarial Networks Using Paired and Unpaired Images
Abstract Slides Poster Similar
Siamese Dynamic Mask Estimation Network for Fast Video Object Segmentation
Dexiang Hong, Guorong Li, Kai Xu, Li Su, Qingming Huang

Auto-TLDR; Siamese Dynamic Mask Estimation for Video Object Segmentation
Abstract Slides Poster Similar
A Systematic Investigation on End-To-End Deep Recognition of Grocery Products in the Wild
Marco Leo, Pierluigi Carcagni, Cosimo Distante
Auto-TLDR; Automatic Recognition of Products on grocery shelf images using Convolutional Neural Networks
Abstract Slides Poster Similar
Boundary Guided Image Translation for Pose Estimation from Ultra-Low Resolution Thermal Sensor
Kohei Kurihara, Tianren Wang, Teng Zhang, Brian Carrington Lovell
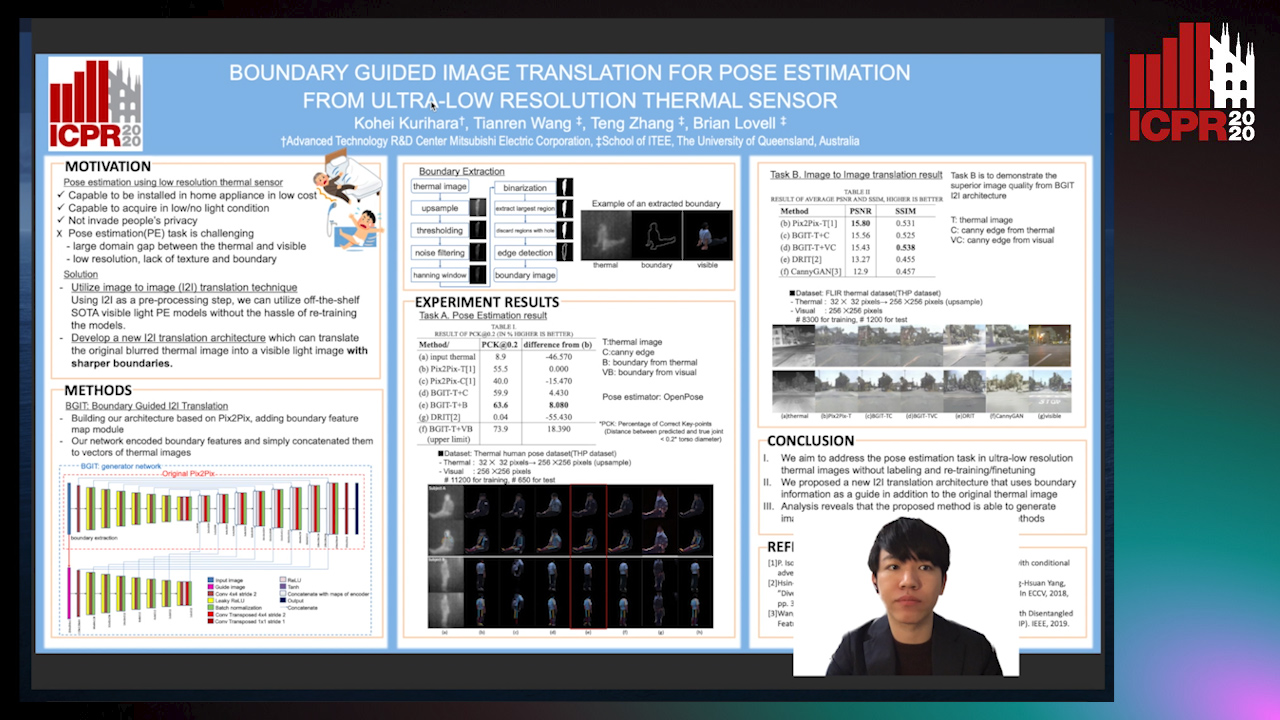
Auto-TLDR; Pose Estimation on Low-Resolution Thermal Images Using Image-to-Image Translation Architecture
Abstract Slides Poster Similar
Detecting Objects with High Object Region Percentage
Fen Fang, Qianli Xu, Liyuan Li, Ying Gu, Joo-Hwee Lim

Auto-TLDR; Faster R-CNN for High-ORP Object Detection
Abstract Slides Poster Similar