Reducing-Over-Time Tree for Event-Based Data
Shane Harrigan,
Sonya Coleman,
Dermot Kerr,
Pratheepan Yogarajah,
Zheng Fang,
Chengdong Wu
Auto-TLDR; Reducing-Over-Time Binary Tree Structure for Event-Based Vision Data
Similar papers
Dynamic Resource-Aware Corner Detection for Bio-Inspired Vision Sensors
Sherif Abdelmonem Sayed Mohamed, Jawad Yasin, Mohammad-Hashem Haghbayan, Antonio Miele, Jukka Veikko Heikkonen, Hannu Tenhunen, Juha Plosila
Auto-TLDR; Three Layer Filtering-Harris Algorithm for Event-based Cameras in Real-Time
Temporal Binary Representation for Event-Based Action Recognition
Simone Undri Innocenti, Federico Becattini, Federico Pernici, Alberto Del Bimbo
Auto-TLDR; Temporal Binary Representation for Gesture Recognition
Abstract Slides Poster Similar
Temporal Pulses Driven Spiking Neural Network for Time and Power Efficient Object Recognition in Autonomous Driving
Wei Wang, Shibo Zhou, Jingxi Li, Xiaohua Li, Junsong Yuan, Zhanpeng Jin

Auto-TLDR; Spiking Neural Network for Real-Time Object Recognition on Temporal LiDAR Pulses
Abstract Slides Poster Similar
A Heuristic-Based Decision Tree for Connected Components Labeling of 3D Volumes
Maximilian Söchting, Stefano Allegretti, Federico Bolelli, Costantino Grana
Auto-TLDR; Entropy Partitioning Decision Tree for Connected Components Labeling
Abstract Slides Poster Similar
On Morphological Hierarchies for Image Sequences
Caglayan Tuna, Alain Giros, François Merciol, Sébastien Lefèvre
Auto-TLDR; Comparison of Hierarchies for Image Sequences
Abstract Slides Poster Similar
Unsupervised Feature Learning for Event Data: Direct vs Inverse Problem Formulation
Dimche Kostadinov, Davide Scarammuza

Auto-TLDR; Unsupervised Representation Learning from Local Event Data for Pattern Recognition
Abstract Slides Poster Similar
VOWEL: A Local Online Learning Rule for Recurrent Networks of Probabilistic Spiking Winner-Take-All Circuits
Hyeryung Jang, Nicolas Skatchkovsky, Osvaldo Simeone
Auto-TLDR; VOWEL: A Variational Online Local Training Rule for Winner-Take-All Spiking Neural Networks
SPA: Stochastic Probability Adjustment for System Balance of Unsupervised SNNs
Xingyu Yang, Mingyuan Meng, Shanlin Xiao, Zhiyi Yu
Auto-TLDR; Stochastic Probability Adjustment for Spiking Neural Networks
Abstract Slides Poster Similar
A Lightweight Network to Learn Optical Flow from Event Data

Auto-TLDR; A lightweight pyramid network with attention mechanism to learn optical flow from events data
Space-Time Domain Tensor Neural Networks: An Application on Human Pose Classification
Konstantinos Makantasis, Athanasios Voulodimos, Anastasios Doulamis, Nikolaos Doulamis, Nikolaos Bakalos
Auto-TLDR; Tensor-Based Neural Network for Spatiotemporal Pose Classifiaction using Three-Dimensional Skeleton Data
Abstract Slides Poster Similar
Map-Based Temporally Consistent Geolocalization through Learning Motion Trajectories

Auto-TLDR; Exploiting Motion Trajectories for Geolocalization of Object on Topological Map using Recurrent Neural Network
Abstract Slides Poster Similar
Spiking Neural Networks with Single-Spike Temporal-Coded Neurons for Network Intrusion Detection
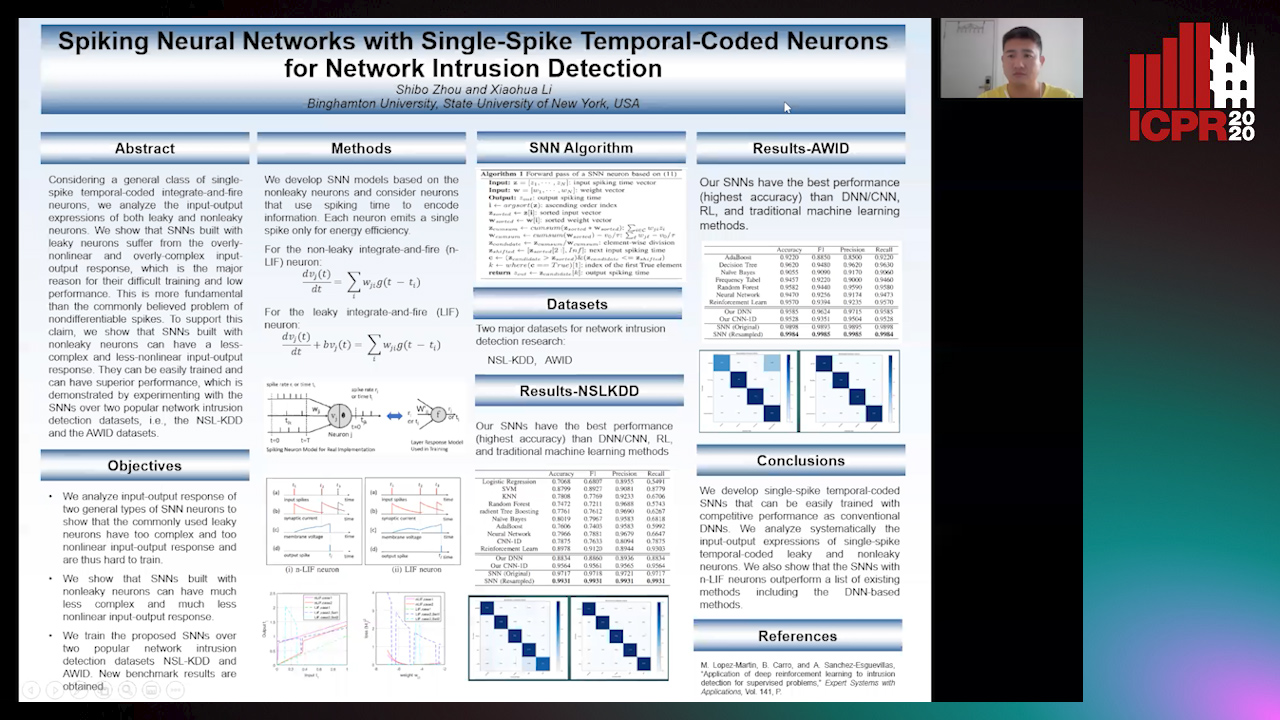
Auto-TLDR; Spiking Neural Network with Leaky Neurons
Abstract Slides Poster Similar
TreeRNN: Topology-Preserving Deep Graph Embedding and Learning
Yecheng Lyu, Ming Li, Xinming Huang, Ulkuhan Guler, Patrick Schaumont, Ziming Zhang
Auto-TLDR; TreeRNN: Recurrent Neural Network for General Graph Classification
Abstract Slides Poster Similar
Subspace Clustering for Action Recognition with Covariance Representations and Temporal Pruning
Giancarlo Paoletti, Jacopo Cavazza, Cigdem Beyan, Alessio Del Bue
Auto-TLDR; Unsupervised Learning for Human Action Recognition from Skeletal Data
Weight Estimation from an RGB-D Camera in Top-View Configuration
Marco Mameli, Marina Paolanti, Nicola Conci, Filippo Tessaro, Emanuele Frontoni, Primo Zingaretti

Auto-TLDR; Top-View Weight Estimation using Deep Neural Networks
Abstract Slides Poster Similar
Distilling Spikes: Knowledge Distillation in Spiking Neural Networks
Ravi Kumar Kushawaha, Saurabh Kumar, Biplab Banerjee, Rajbabu Velmurugan
Auto-TLDR; Knowledge Distillation in Spiking Neural Networks for Image Classification
Abstract Slides Poster Similar
RWF-2000: An Open Large Scale Video Database for Violence Detection
Ming Cheng, Kunjing Cai, Ming Li
Auto-TLDR; Flow Gated Network for Violence Detection in Surveillance Cameras
Abstract Slides Poster Similar
RISEdb: A Novel Indoor Localization Dataset
Carlos Sanchez Belenguer, Erik Wolfart, Álvaro Casado Coscollá, Vitor Sequeira

Auto-TLDR; Indoor Localization Using LiDAR SLAM and Smartphones: A Benchmarking Dataset
Abstract Slides Poster Similar
Automated Whiteboard Lecture Video Summarization by Content Region Detection and Representation
Bhargava Urala Kota, Alexander Stone, Kenny Davila, Srirangaraj Setlur, Venu Govindaraju
Auto-TLDR; A Framework for Summarizing Whiteboard Lecture Videos Using Feature Representations of Handwritten Content Regions
RMS-Net: Regression and Masking for Soccer Event Spotting
Matteo Tomei, Lorenzo Baraldi, Simone Calderara, Simone Bronzin, Rita Cucchiara

Auto-TLDR; An Action Spotting Network for Soccer Videos
Abstract Slides Poster Similar
The DeepHealth Toolkit: A Unified Framework to Boost Biomedical Applications
Michele Cancilla, Laura Canalini, Federico Bolelli, Stefano Allegretti, Salvador Carrión, Roberto Paredes, Jon Ander Gómez, Simone Leo, Marco Enrico Piras, Luca Pireddu, Asaf Badouh, Santiago Marco-Sola, Lluc Alvarez, Miquel Moreto, Costantino Grana
Auto-TLDR; DeepHealth Toolkit: An Open Source Deep Learning Toolkit for Cloud Computing and HPC
Abstract Slides Poster Similar
Algorithm Recommendation for Data Streams
Jáder Martins Camboim De Sá, Andre Luis Debiaso Rossi, Gustavo Enrique De Almeida Prado Alves Batista, Luís Paulo Faina Garcia
Auto-TLDR; Meta-Learning for Algorithm Selection in Time-Changing Data Streams
Abstract Slides Poster Similar
Decision Snippet Features
Pascal Welke, Fouad Alkhoury, Christian Bauckhage, Stefan Wrobel
Auto-TLDR; Decision Snippet Features for Interpretability
Abstract Slides Poster Similar
Explainable Online Validation of Machine Learning Models for Practical Applications
Wolfgang Fuhl, Yao Rong, Thomas Motz, Michael Scheidt, Andreas Markus Hartel, Andreas Koch, Enkelejda Kasneci
Auto-TLDR; A Reformulation of Regression and Classification for Machine Learning Algorithm Validation
Abstract Slides Poster Similar
Mobile Augmented Reality: Fast, Precise, and Smooth Planar Object Tracking
Dmitrii Matveichev, Daw-Tung Lin

Auto-TLDR; Planar Object Tracking with Sparse Optical Flow Tracking and Descriptor Matching
Abstract Slides Poster Similar
IPT: A Dataset for Identity Preserved Tracking in Closed Domains
Thomas Heitzinger, Martin Kampel

Auto-TLDR; Identity Preserved Tracking Using Depth Data for Privacy and Privacy
Abstract Slides Poster Similar
Unconstrained Vision Guided UAV Based Safe Helicopter Landing
Arindam Sikdar, Abhimanyu Sahu, Debajit Sen, Rohit Mahajan, Ananda Chowdhury

Auto-TLDR; Autonomous Helicopter Landing in Hazardous Environments from Unmanned Aerial Images Using Constrained Graph Clustering
Abstract Slides Poster Similar
ResNet-Like Architecture with Low Hardware Requirements
Elena Limonova, Daniil Alfonso, Dmitry Nikolaev, Vladimir V. Arlazarov
Auto-TLDR; BM-ResNet: Bipolar Morphological ResNet for Image Classification
Abstract Slides Poster Similar
Class-Incremental Learning with Pre-Allocated Fixed Classifiers
Federico Pernici, Matteo Bruni, Claudio Baecchi, Francesco Turchini, Alberto Del Bimbo
Auto-TLDR; Class-Incremental Learning with Pre-allocated Output Nodes for Fixed Classifier
Abstract Slides Poster Similar
Compression Strategies and Space-Conscious Representations for Deep Neural Networks
Giosuè Marinò, Gregorio Ghidoli, Marco Frasca, Dario Malchiodi

Auto-TLDR; Compression of Large Convolutional Neural Networks by Weight Pruning and Quantization
Abstract Slides Poster Similar
Appliance Identification Using a Histogram Post-Processing of 2D Local Binary Patterns for Smart Grid Applications
Yassine Himeur, Abdullah Alsalemi, Faycal Bensaali, Abbes Amira

Auto-TLDR; LBP-BEVM based Local Binary Patterns for Appliances Identification in the Smart Grid
Benchmarking Cameras for OpenVSLAM Indoors
Kevin Chappellet, Guillaume Caron, Fumio Kanehiro, Ken Sakurada, Abderrahmane Kheddar

Auto-TLDR; OpenVSLAM: Benchmarking Camera Types for Visual Simultaneous Localization and Mapping
Abstract Slides Poster Similar
SAILenv: Learning in Virtual Visual Environments Made Simple
Enrico Meloni, Luca Pasqualini, Matteo Tiezzi, Marco Gori, Stefano Melacci

Auto-TLDR; SAILenv: A Simple and Customized Platform for Visual Recognition in Virtual 3D Environment
Abstract Slides Poster Similar
Attention-Oriented Action Recognition for Real-Time Human-Robot Interaction
Ziyang Song, Ziyi Yin, Zejian Yuan, Chong Zhang, Wanchao Chi, Yonggen Ling, Shenghao Zhang
Auto-TLDR; Attention-Oriented Multi-Level Network for Action Recognition in Interaction Scenes
Abstract Slides Poster Similar
SL-DML: Signal Level Deep Metric Learning for Multimodal One-Shot Action Recognition
Raphael Memmesheimer, Nick Theisen, Dietrich Paulus
Auto-TLDR; One-Shot Action Recognition using Metric Learning
Quantified Facial Temporal-Expressiveness Dynamics for Affect Analysis
Md Taufeeq Uddin, Shaun Canavan
Auto-TLDR; quantified facial Temporal-expressiveness Dynamics for quantified affect analysis
One Step Clustering Based on A-Contrario Framework for Detection of Alterations in Historical Violins
Alireza Rezaei, Sylvie Le Hégarat-Mascle, Emanuel Aldea, Piercarlo Dondi, Marco Malagodi

Auto-TLDR; A-Contrario Clustering for the Detection of Altered Violins using UVIFL Images
Abstract Slides Poster Similar
Online Object Recognition Using CNN-Based Algorithm on High-Speed Camera Imaging
Shigeaki Namiki, Keiko Yokoyama, Shoji Yachida, Takashi Shibata, Hiroyoshi Miyano, Masatoshi Ishikawa
Auto-TLDR; Real-Time Object Recognition with High-Speed Camera Imaging with Population Data Clearing and Data Ensemble
Abstract Slides Poster Similar
Location Prediction in Real Homes of Older Adults based on K-Means in Low-Resolution Depth Videos
Simon Simonsson, Flávia Dias Casagrande, Evi Zouganeli
Auto-TLDR; Semi-supervised Learning for Location Recognition and Prediction in Smart Homes using Depth Video Cameras
Abstract Slides Poster Similar
A Fine-Grained Dataset and Its Efficient Semantic Segmentation for Unstructured Driving Scenarios
Kai Andreas Metzger, Peter Mortimer, Hans J "Joe" Wuensche

Auto-TLDR; TAS500: A Semantic Segmentation Dataset for Autonomous Driving in Unstructured Environments
Abstract Slides Poster Similar
Learning Sparse Deep Neural Networks Using Efficient Structured Projections on Convex Constraints for Green AI
Michel Barlaud, Frederic Guyard

Auto-TLDR; Constrained Deep Neural Network with Constrained Splitting Projection
Abstract Slides Poster Similar
A Hierarchical Framework for Leaf Instance Segmentation: Application to Plant Phenotyping
Swati Bhugra, Kanish Garg, Santanu Chaudhury, Brejesh Lall
Auto-TLDR; Under-segmentation of plant image using a graph based formulation to extract leaf shape knowledge for the task of leaf instance segmentation
Abstract Slides Poster Similar
Fall Detection by Human Pose Estimation and Kinematic Theory
Vincenzo Dentamaro, Donato Impedovo, Giuseppe Pirlo
Auto-TLDR; A Decision Support System for Automatic Fall Detection on Le2i and URFD Datasets
Abstract Slides Poster Similar
A Grid-Based Representation for Human Action Recognition
Soufiane Lamghari, Guillaume-Alexandre Bilodeau, Nicolas Saunier

Auto-TLDR; GRAR: Grid-based Representation for Action Recognition in Videos
Abstract Slides Poster Similar
Learning Dictionaries of Kinematic Primitives for Action Classification
Alessia Vignolo, Nicoletta Noceti, Alessandra Sciutti, Francesca Odone, Giulio Sandini
Auto-TLDR; Action Understanding using Visual Motion Primitives
Abstract Slides Poster Similar
Edge-Aware Graph Attention Network for Ratio of Edge-User Estimation in Mobile Networks
Jiehui Deng, Sheng Wan, Xiang Wang, Enmei Tu, Xiaolin Huang, Jie Yang, Chen Gong
Auto-TLDR; EAGAT: Edge-Aware Graph Attention Network for Automatic REU Estimation in Mobile Networks
Abstract Slides Poster Similar
Which are the factors affecting the performance of audio surveillance systems?
Antonio Greco, Antonio Roberto, Alessia Saggese, Mario Vento
Auto-TLDR; Sound Event Recognition Using Convolutional Neural Networks and Visual Representations on MIVIA Audio Events
Spatial Bias in Vision-Based Voice Activity Detection
Kalin Stefanov, Mohammad Adiban, Giampiero Salvi
Auto-TLDR; Spatial Bias in Vision-based Voice Activity Detection in Multiparty Human-Human Interactions