3D Audio-Visual Speaker Tracking with a Novel Particle Filter
Hong Liu,
Yongheng Sun,
Yidi Li,
Bing Yang
Auto-TLDR; 3D audio-visual speaker tracking using particle filter based method
Similar papers
Audio-Visual Speech Recognition Using a Two-Step Feature Fusion Strategy
Auto-TLDR; A Two-Step Feature Fusion Network for Speech Recognition
Abstract Slides Poster Similar
Robust Audio-Visual Speech Recognition Based on Hybrid Fusion
Hong Liu, Wenhao Li, Bing Yang
Auto-TLDR; Hybrid Fusion Based AVSR with Residual Networks and Bidirectional Gated Recurrent Unit for Robust Speech Recognition in Noise Conditions
Abstract Slides Poster Similar
Audio-Video Detection of the Active Speaker in Meetings
Francisco Madrigal, Frederic Lerasle, Lionel Pibre, Isabelle Ferrané

Auto-TLDR; Active Speaker Detection with Visual and Contextual Information from Meeting Context
Abstract Slides Poster Similar
Three-Dimensional Lip Motion Network for Text-Independent Speaker Recognition
Jianrong Wang, Tong Wu, Shanyu Wang, Mei Yu, Qiang Fang, Ju Zhang, Li Liu
Auto-TLDR; Lip Motion Network for Text-Independent and Text-Dependent Speaker Recognition
Abstract Slides Poster Similar
Mutual Alignment between Audiovisual Features for End-To-End Audiovisual Speech Recognition
Hong Liu, Yawei Wang, Bing Yang
Auto-TLDR; Mutual Iterative Attention for Audio Visual Speech Recognition
Abstract Slides Poster Similar
Spatial Bias in Vision-Based Voice Activity Detection
Kalin Stefanov, Mohammad Adiban, Giampiero Salvi
Auto-TLDR; Spatial Bias in Vision-based Voice Activity Detection in Multiparty Human-Human Interactions
Visual Saliency Oriented Vehicle Scale Estimation
Qixin Chen, Tie Liu, Jiali Ding, Zejian Yuan, Yuanyuan Shang

Auto-TLDR; Regularized Intensity Matching for Vehicle Scale Estimation with salient object detection
Abstract Slides Poster Similar
An Adaptive Fusion Model Based on Kalman Filtering and LSTM for Fast Tracking of Road Signs
Chengliang Wang, Xin Xie, Chao Liao

Auto-TLDR; Fusion of ThunderNet and Region Growing Detector for Road Sign Detection and Tracking
Abstract Slides Poster Similar
DAL: A Deep Depth-Aware Long-Term Tracker
Yanlin Qian, Song Yan, Alan Lukežič, Matej Kristan, Joni-Kristian Kamarainen, Jiri Matas

Auto-TLDR; Deep Depth-Aware Long-Term RGBD Tracking with Deep Discriminative Correlation Filter
Abstract Slides Poster Similar
Utilising Visual Attention Cues for Vehicle Detection and Tracking
Feiyan Hu, Venkatesh Gurram Munirathnam, Noel E O'Connor, Alan Smeaton, Suzanne Little

Auto-TLDR; Visual Attention for Object Detection and Tracking in Driver-Assistance Systems
Abstract Slides Poster Similar
Improving Mix-And-Separate Training in Audio-Visual Sound Source Separation with an Object Prior
Quan Nguyen, Simone Frintrop, Timo Gerkmann, Mikko Lauri, Julius Richter
Auto-TLDR; Object-Prior: Learning the 1-to-1 correspondence between visual and audio signals by audio- visual sound source methods
TSDM: Tracking by SiamRPN++ with a Depth-Refiner and a Mask-Generator
Pengyao Zhao, Quanli Liu, Wei Wang, Qiang Guo
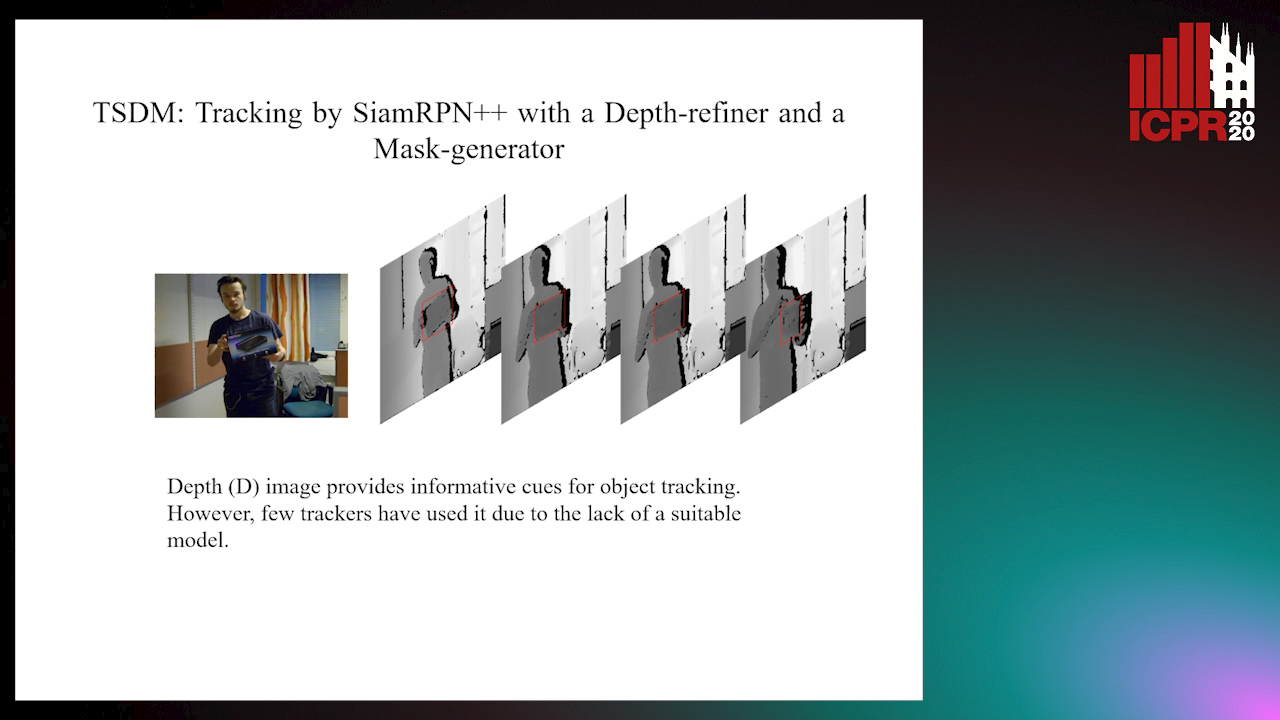
Auto-TLDR; TSDM: A Depth-D Tracker for 3D Object Tracking
Abstract Slides Poster Similar
Learning Visual Voice Activity Detection with an Automatically Annotated Dataset
Stéphane Lathuiliere, Pablo Mesejo, Radu Horaud
Auto-TLDR; Deep Visual Voice Activity Detection with Optical Flow
Efficient Correlation Filter Tracking with Adaptive Training Sample Update Scheme
Shan Jiang, Shuxiao Li, Chengfei Zhu, Nan Yan
Auto-TLDR; Adaptive Training Sample Update Scheme of Correlation Filter Based Trackers for Visual Tracking
Abstract Slides Poster Similar
Detection of Calls from Smart Speaker Devices
Vinay Maddali, David Looney, Kailash Patil
Auto-TLDR; Distinguishing Between Smart Speaker and Cell Devices Using Only the Audio Using a Feature Set
Abstract Slides Poster Similar
Single-Modal Incremental Terrain Clustering from Self-Supervised Audio-Visual Feature Learning
Reina Ishikawa, Ryo Hachiuma, Akiyoshi Kurobe, Hideo Saito
Auto-TLDR; Multi-modal Variational Autoencoder for Terrain Type Clustering
Abstract Slides Poster Similar
Mobile Augmented Reality: Fast, Precise, and Smooth Planar Object Tracking
Dmitrii Matveichev, Daw-Tung Lin

Auto-TLDR; Planar Object Tracking with Sparse Optical Flow Tracking and Descriptor Matching
Abstract Slides Poster Similar
Adaptive Context-Aware Discriminative Correlation Filters for Robust Visual Object Tracking
Tianyang Xu, Zhenhua Feng, Xiaojun Wu, Josef Kittler
Auto-TLDR; ACA-DCF: Adaptive Context-Aware Discriminative Correlation Filter with complementary attention mechanisms
Abstract Slides Poster Similar
Unsupervised Sound Source Localization From Audio-Image Pairs Using Input Gradient Map
Tomohiro Tanaka, Takahiro Shinozaki
Auto-TLDR; Unsupervised Sound Localization Using Gradient Method
Abstract Slides Poster Similar
Person Recognition with HGR Maximal Correlation on Multimodal Data
Yihua Liang, Fei Ma, Yang Li, Shao-Lun Huang
Auto-TLDR; A correlation-based multimodal person recognition framework that learns discriminative embeddings of persons by joint learning visual features and audio features
Abstract Slides Poster Similar
Are Multiple Cross-Correlation Identities Better Than Just Two? Improving the Estimate of Time Differences-Of-Arrivals from Blind Audio Signals
Danilo Greco, Jacopo Cavazza, Alessio Del Bue

Auto-TLDR; Improving Blind Channel Identification Using Cross-Correlation Identity for Time Differences-of-Arrivals Estimation
Abstract Slides Poster Similar
A Neural Lip-Sync Framework for Synthesizing Photorealistic Virtual News Anchors
Ruobing Zheng, Zhou Zhu, Bo Song, Ji Changjiang
Auto-TLDR; Lip-sync: Synthesis of a Virtual News Anchor for Low-Delayed Applications
Abstract Slides Poster Similar
AerialMPTNet: Multi-Pedestrian Tracking in Aerial Imagery Using Temporal and Graphical Features
Maximilian Kraus, Seyed Majid Azimi, Emec Ercelik, Reza Bahmanyar, Peter Reinartz, Alois Knoll

Auto-TLDR; AerialMPTNet: A novel approach for multi-pedestrian tracking in geo-referenced aerial imagery by fusing appearance features
Abstract Slides Poster Similar
Unsupervised Co-Segmentation for Athlete Movements and Live Commentaries Using Crossmodal Temporal Proximity
Yasunori Ohishi, Yuki Tanaka, Kunio Kashino
Auto-TLDR; A guided attention scheme for audio-visual co-segmentation
Abstract Slides Poster Similar
Siamese Fully Convolutional Tracker with Motion Correction
Mathew Francis, Prithwijit Guha

Auto-TLDR; A Siamese Ensemble for Visual Tracking with Appearance and Motion Components
Abstract Slides Poster Similar
Let's Play Music: Audio-Driven Performance Video Generation
Hao Zhu, Yi Li, Feixia Zhu, Aihua Zheng, Ran He
Auto-TLDR; APVG: Audio-driven Performance Video Generation Using Structured Temporal UNet
Abstract Slides Poster Similar
RSINet: Rotation-Scale Invariant Network for Online Visual Tracking
Yang Fang, Geunsik Jo, Chang-Hee Lee

Auto-TLDR; RSINet: Rotation-Scale Invariant Network for Adaptive Tracking
Abstract Slides Poster Similar
Hybrid Network for End-To-End Text-Independent Speaker Identification
Wajdi Ghezaiel, Luc Brun, Olivier Lezoray
Auto-TLDR; Text-Independent Speaker Identification with Scattering Wavelet Network and Convolutional Neural Networks
Abstract Slides Poster Similar
Real-Time Drone Detection and Tracking with Visible, Thermal and Acoustic Sensors
Fredrik Svanström, Cristofer Englund, Fernando Alonso-Fernandez
Auto-TLDR; Automatic multi-sensor drone detection using sensor fusion
Abstract Slides Poster Similar
NetCalib: A Novel Approach for LiDAR-Camera Auto-Calibration Based on Deep Learning
Shan Wu, Amnir Hadachi, Damien Vivet, Yadu Prabhakar

Auto-TLDR; Automatic Calibration of LiDAR and Cameras using Deep Neural Network
Abstract Slides Poster Similar
Audio-Visual Predictive Coding for Self-Supervised Visual Representation Learning
Mani Kumar Tellamekala, Michel Valstar, Michael Pound, Timo Giesbrecht
Auto-TLDR; AV-PPC: A Multi-task Learning Framework for Learning Semantic Visual Features from Unlabeled Video Data
Abstract Slides Poster Similar
Digit Recognition Applied to Reconstructed Audio Signals Using Deep Learning
Anastasia-Sotiria Toufa, Constantine Kotropoulos
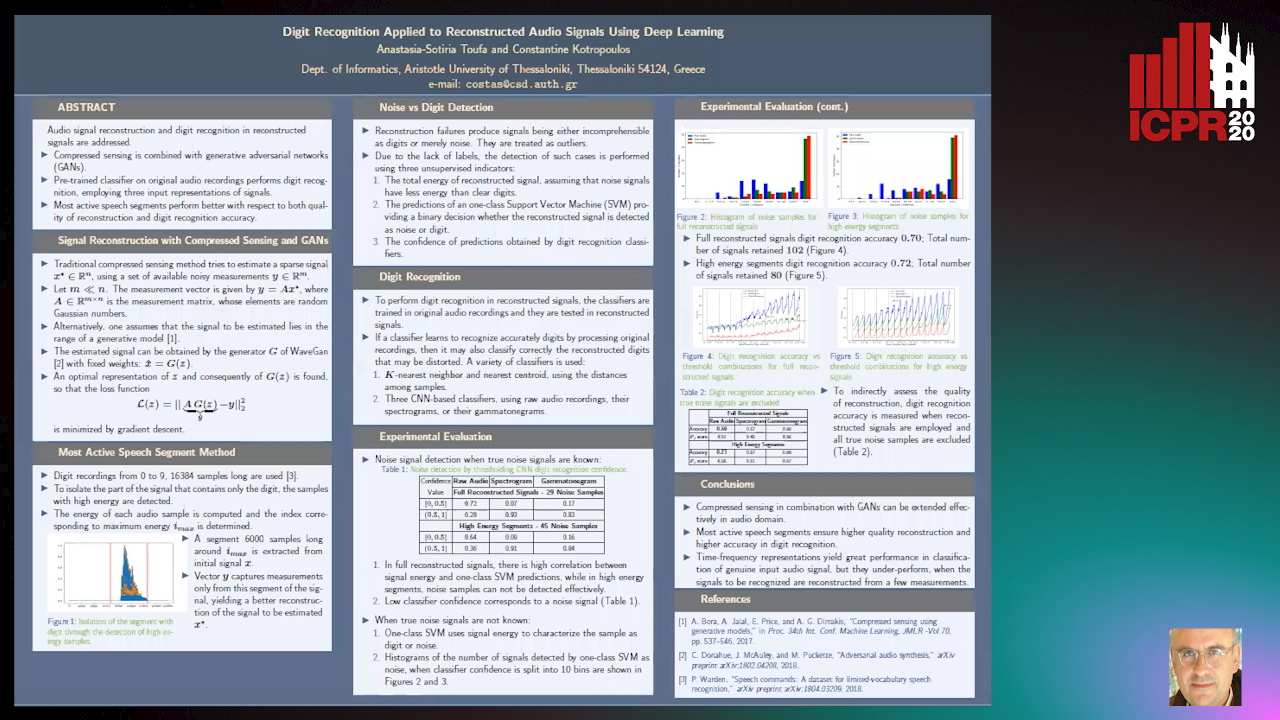
Auto-TLDR; Compressed Sensing for Digit Recognition in Audio Reconstruction
Rotational Adjoint Methods for Learning-Free 3D Human Pose Estimation from IMU Data
Caterina Emilia Agelide Buizza, Yiannis Demiris

Auto-TLDR; Learning-free 3D Human Pose Estimation from Inertial Measurement Unit Data
Total Estimation from RGB Video: On-Line Camera Self-Calibration, Non-Rigid Shape and Motion

Auto-TLDR; Joint Auto-Calibration, Pose and 3D Reconstruction of a Non-rigid Object from an uncalibrated RGB Image Sequence
Abstract Slides Poster Similar
Visual Object Tracking in Drone Images with Deep Reinforcement Learning

Auto-TLDR; A Deep Reinforcement Learning based Single Object Tracker for Drone Applications
Abstract Slides Poster Similar
Unsupervised Moving Object Detection through Background Models for PTZ Camera
Kimin Yun, Hyung-Il Kim, Kangmin Bae, Jongyoul Park
Auto-TLDR; Unsupervised Moving Object Detection in a PTZ Camera through Two Background Models
Abstract Slides Poster Similar
AV-SLAM: Autonomous Vehicle SLAM with Gravity Direction Initialization
Kaan Yilmaz, Baris Suslu, Sohini Roychowdhury, L. Srikar Muppirisetty

Auto-TLDR; VI-SLAM with AGI: A combination of three SLAM algorithms for autonomous vehicles
Abstract Slides Poster Similar
Which are the factors affecting the performance of audio surveillance systems?
Antonio Greco, Antonio Roberto, Alessia Saggese, Mario Vento
Auto-TLDR; Sound Event Recognition Using Convolutional Neural Networks and Visual Representations on MIVIA Audio Events
Generic Merging of Structure from Motion Maps with a Low Memory Footprint
Gabrielle Flood, David Gillsjö, Patrik Persson, Anders Heyden, Kalle Åström

Auto-TLDR; A Low-Memory Footprint Representation for Robust Map Merge
Abstract Slides Poster Similar
DenseRecognition of Spoken Languages
Jaybrata Chakraborty, Bappaditya Chakraborty, Ujjwal Bhattacharya
Auto-TLDR; DenseNet: A Dense Convolutional Network Architecture for Speech Recognition in Indian Languages
Abstract Slides Poster Similar
Model Decay in Long-Term Tracking
Efstratios Gavves, Ran Tao, Deepak Gupta, Arnold Smeulders
Auto-TLDR; Model Bias in Long-Term Tracking
Abstract Slides Poster Similar
Siamese Dynamic Mask Estimation Network for Fast Video Object Segmentation
Dexiang Hong, Guorong Li, Kai Xu, Li Su, Qingming Huang

Auto-TLDR; Siamese Dynamic Mask Estimation for Video Object Segmentation
Abstract Slides Poster Similar
Visual Localization for Autonomous Driving: Mapping the Accurate Location in the City Maze
Dongfang Liu, Yiming Cui, Xiaolei Guo, Wei Ding, Baijian Yang, Yingjie Chen

Auto-TLDR; Feature Voting for Robust Visual Localization in Urban Settings
Abstract Slides Poster Similar
Toward Text-Independent Cross-Lingual Speaker Recognition Using English-Mandarin-Taiwanese Dataset
Auto-TLDR; Cross-lingual Speech for Biometric Recognition
Dynamic Resource-Aware Corner Detection for Bio-Inspired Vision Sensors
Sherif Abdelmonem Sayed Mohamed, Jawad Yasin, Mohammad-Hashem Haghbayan, Antonio Miele, Jukka Veikko Heikkonen, Hannu Tenhunen, Juha Plosila
Auto-TLDR; Three Layer Filtering-Harris Algorithm for Event-based Cameras in Real-Time
Talking Face Generation Via Learning Semantic and Temporal Synchronous Landmarks
Aihua Zheng, Feixia Zhu, Hao Zhu, Mandi Luo, Ran He
Auto-TLDR; A semantic and temporal synchronous landmark learning method for talking face generation
Abstract Slides Poster Similar
Reducing False Positives in Object Tracking with Siamese Network
Takuya Ogawa, Takashi Shibata, Shoji Yachida, Toshinori Hosoi
Auto-TLDR; Robust Long-Term Object Tracking with Adaptive Search based on Motion Models
Abstract Slides Poster Similar
Accurate Background Subtraction Using Dynamic Object Presence Probability in Sports Scenes
Ryosuke Watanabe, Jun Chen, Tomoaki Konno, Sei Naito
Auto-TLDR; DOPP: Dynamic Object Presence Probabilistic Background Subtraction for Foreground Segmentation
Abstract Slides Poster Similar