Fast Multi-Level Foreground Estimation
Thomas Germer,
Tobias Uelwer,
Stefan Conrad,
Stefan Harmeling
Auto-TLDR; Fur foreground estimation given the alpha matte
Similar papers
FC-DCNN: A Densely Connected Neural Network for Stereo Estimation
Dominik Hirner, Friedrich Fraundorfer

Auto-TLDR; FC-DCNN: A Lightweight Network for Stereo Estimation
Abstract Slides Poster Similar
Learning to Segment Clustered Amoeboid Cells from Brightfield Microscopy Via Multi-Task Learning with Adaptive Weight Selection
Rituparna Sarkar, Suvadip Mukherjee, Elisabeth Labruyere, Jean-Christophe Olivo-Marin
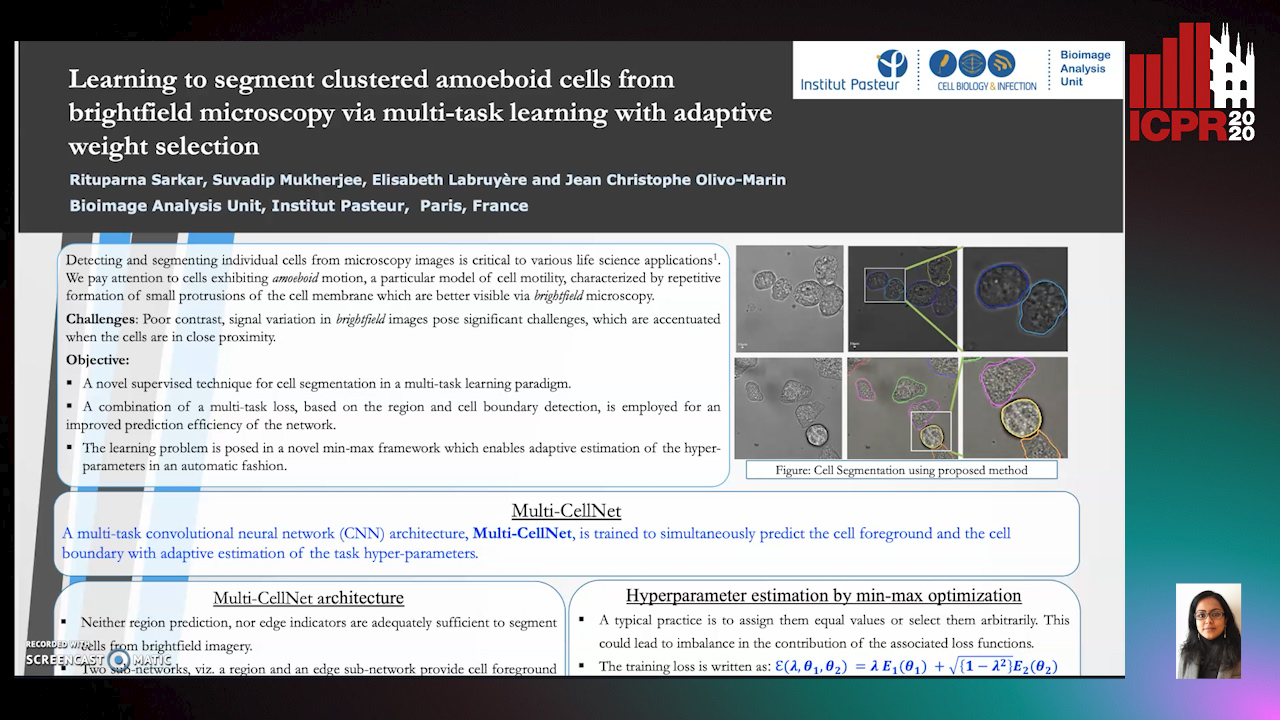
Auto-TLDR; Supervised Cell Segmentation from Microscopy Images using Multi-task Learning in a Multi-Task Learning Paradigm
Two-Stage Adaptive Object Scene Flow Using Hybrid CNN-CRF Model
Congcong Li, Haoyu Ma, Qingmin Liao

Auto-TLDR; Adaptive object scene flow estimation using a hybrid CNN-CRF model and adaptive iteration
Abstract Slides Poster Similar
Semi-Supervised Deep Learning Techniques for Spectrum Reconstruction
Adriano Simonetto, Vincent Parret, Alexander Gatto, Piergiorgio Sartor, Pietro Zanuttigh
Auto-TLDR; hyperspectral data estimation from RGB data using semi-supervised learning
Abstract Slides Poster Similar
Phase Retrieval Using Conditional Generative Adversarial Networks
Tobias Uelwer, Alexander Oberstraß, Stefan Harmeling
Auto-TLDR; Conditional Generative Adversarial Networks for Phase Retrieval
Abstract Slides Poster Similar
Cost Volume Refinement for Depth Prediction
João L. Cardoso, Nuno Goncalves, Michael Wimmer

Auto-TLDR; Refining the Cost Volume for Depth Prediction from Light Field Cameras
Abstract Slides Poster Similar
Automatical Enhancement and Denoising of Extremely Low-Light Images
Yuda Song, Yunfang Zhu, Xin Du
Auto-TLDR; INSNet: Illumination and Noise Separation Network for Low-Light Image Restoring
Abstract Slides Poster Similar
Camera Calibration Using Parallel Line Segments

Auto-TLDR; Closed-Form Calibration of Surveillance Cameras using Parallel 3D Line Segment Projections
Abstract Slides Poster Similar
Deep Iterative Residual Convolutional Network for Single Image Super-Resolution
Rao Muhammad Umer, Gian Luca Foresti, Christian Micheloni
Auto-TLDR; ISRResCNet: Deep Iterative Super-Resolution Residual Convolutional Network for Single Image Super-resolution
Generic Merging of Structure from Motion Maps with a Low Memory Footprint
Gabrielle Flood, David Gillsjö, Patrik Persson, Anders Heyden, Kalle Åström

Auto-TLDR; A Low-Memory Footprint Representation for Robust Map Merge
Abstract Slides Poster Similar
FastSal: A Computationally Efficient Network for Visual Saliency Prediction
Auto-TLDR; MobileNetV2: A Convolutional Neural Network for Saliency Prediction
Abstract Slides Poster Similar
Understanding Integrated Gradients with SmoothTaylor for Deep Neural Network Attribution
Gary Shing Wee Goh, Sebastian Lapuschkin, Leander Weber, Wojciech Samek, Alexander Binder
Auto-TLDR; SmoothGrad: bridging Integrated Gradients and SmoothGrad from the Taylor's theorem perspective
3D Pots Configuration System by Optimizing Over Geometric Constraints
Jae Eun Kim, Muhammad Zeeshan Arshad, Seong Jong Yoo, Je Hyeong Hong, Jinwook Kim, Young Min Kim

Auto-TLDR; Optimizing 3D Configurations for Stable Pottery Restoration from irregular and noisy evidence
Abstract Slides Poster Similar
A Globally Optimal Method for the PnP Problem with MRP Rotation Parameterization
Manolis Lourakis, George Terzakis
Auto-TLDR; A Direct least squares, algebraic PnP solver with modified Rodrigues parameters
Fast Region-Adaptive Defogging and Enhancement for Outdoor Images Containing Sky
Zhan Li, Xiaopeng Zheng, Bir Bhanu, Shun Long, Qingfeng Zhang, Zhenghao Huang

Auto-TLDR; Image defogging and enhancement of hazy outdoor scenes using region-adaptive segmentation and region-ratio-based adaptive Gamma correction
Abstract Slides Poster Similar
SIDGAN: Single Image Dehazing without Paired Supervision
Pan Wei, Xin Wang, Lei Wang, Ji Xiang, Zihan Wang
Auto-TLDR; DehazeGAN: An End-to-End Generative Adversarial Network for Image Dehazing
Abstract Slides Poster Similar
Future Urban Scenes Generation through Vehicles Synthesis
Alessandro Simoni, Luca Bergamini, Andrea Palazzi, Simone Calderara, Rita Cucchiara

Auto-TLDR; Predicting the Future of an Urban Scene with a Novel View Synthesis Paradigm
Abstract Slides Poster Similar
Extending Single Beam Lidar to Full Resolution by Fusing with Single Image Depth Estimation
Yawen Lu, Yuxing Wang, Devarth Parikh, Guoyu Lu

Auto-TLDR; Self-supervised LIDAR for Low-Cost Depth Estimation
Real-Time Monocular Depth Estimation with Extremely Light-Weight Neural Network
Mian Jhong Chiu, Wei-Chen Chiu, Hua-Tsung Chen, Jen-Hui Chuang

Auto-TLDR; Real-Time Light-Weight Depth Prediction for Obstacle Avoidance and Environment Sensing with Deep Learning-based CNN
Abstract Slides Poster Similar
Point In: Counting Trees with Weakly Supervised Segmentation Network
Pinmo Tong, Shuhui Bu, Pengcheng Han

Auto-TLDR; Weakly Tree counting using Deep Segmentation Network with Localization and Mask Prediction
Abstract Slides Poster Similar
LFIEM: Lightweight Filter-Based Image Enhancement Model
Oktai Tatanov, Aleksei Samarin
Auto-TLDR; Image Retouching Using Semi-supervised Learning for Mobile Devices
Abstract Slides Poster Similar
Adaptive Estimation of Optimal Color Transformations for Deep Convolutional Network Based Homography Estimation
Miguel A. Molina-Cabello, Jorge García-González, Rafael Marcos Luque-Baena, Karl Thurnhofer-Hemsi, Ezequiel López-Rubio
Auto-TLDR; Improving Homography Estimation from a Pair of Natural Images Using Deep Convolutional Neural Networks
Abstract Slides Poster Similar
A Two-Step Approach to Lidar-Camera Calibration
Yingna Su, Yaqing Ding, Jian Yang, Hui Kong

Auto-TLDR; Closed-Form Calibration of Lidar-camera System for Ego-motion Estimation and Scene Understanding
Abstract Slides Poster Similar
Norm Loss: An Efficient yet Effective Regularization Method for Deep Neural Networks
Theodoros Georgiou, Sebastian Schmitt, Thomas Baeck, Wei Chen, Michael Lew
Auto-TLDR; Weight Soft-Regularization with Oblique Manifold for Convolutional Neural Network Training
Abstract Slides Poster Similar
Visual Saliency Oriented Vehicle Scale Estimation
Qixin Chen, Tie Liu, Jiali Ding, Zejian Yuan, Yuanyuan Shang

Auto-TLDR; Regularized Intensity Matching for Vehicle Scale Estimation with salient object detection
Abstract Slides Poster Similar
Boosting High-Level Vision with Joint Compression Artifacts Reduction and Super-Resolution
Xiaoyu Xiang, Qian Lin, Jan Allebach
Auto-TLDR; A Context-Aware Joint CAR and SR Neural Network for High-Resolution Text Recognition and Face Detection
Abstract Slides Poster Similar
Near-Infrared Depth-Independent Image Dehazing using Haar Wavelets
Sumit Laha, Ankit Sharma, Shengnan Hu, Hassan Foroosh
Auto-TLDR; A fusion algorithm for haze removal using Haar wavelets
Abstract Slides Poster Similar
HMFlow: Hybrid Matching Optical Flow Network for Small and Fast-Moving Objects
Suihanjin Yu, Youmin Zhang, Chen Wang, Xiao Bai, Liang Zhang, Edwin Hancock
Auto-TLDR; Hybrid Matching Optical Flow Network with Global Matching Component
Abstract Slides Poster Similar
P2D: A Self-Supervised Method for Depth Estimation from Polarimetry
Marc Blanchon, Desire Sidibe, Olivier Morel, Ralph Seulin, Daniel Braun, Fabrice Meriaudeau

Auto-TLDR; Polarimetric Regularization for Monocular Depth Estimation
Abstract Slides Poster Similar
Dynamic Guided Network for Monocular Depth Estimation
Xiaoxia Xing, Yinghao Cai, Yiping Yang, Dayong Wen

Auto-TLDR; DGNet: Dynamic Guidance Upsampling for Self-attention-Decoding for Monocular Depth Estimation
Abstract Slides Poster Similar
Multi-scale Processing of Noisy Images using Edge Preservation Losses
Auto-TLDR; Multi-scale U-net for Noisy Image Detection and Denoising
Abstract Slides Poster Similar
Learning Knowledge-Rich Sequential Model for Planar Homography Estimation in Aerial Video

Auto-TLDR; Sequential Estimation of Planar Homographic Transformations over Aerial Videos
Abstract Slides Poster Similar
Edge-Aware Monocular Dense Depth Estimation with Morphology
Zhi Li, Xiaoyang Zhu, Haitao Yu, Qi Zhang, Yongshi Jiang

Auto-TLDR; Spatio-Temporally Smooth Dense Depth Maps Using Only a CPU
Abstract Slides Poster Similar
A Multilinear Sampling Algorithm to Estimate Shapley Values
Auto-TLDR; A sampling method for Shapley values for multilayer Perceptrons
Abstract Slides Poster Similar
3CS Algorithm for Efficient Gaussian Process Model Retrieval
Fabian Berns, Kjeld Schmidt, Ingolf Bracht, Christian Beecks
Auto-TLDR; Efficient retrieval of Gaussian Process Models for large-scale data using divide-&-conquer-based approach
Abstract Slides Poster Similar
Hierarchically Aggregated Residual Transformation for Single Image Super Resolution
Auto-TLDR; HARTnet: Hierarchically Aggregated Residual Transformation for Multi-Scale Super-resolution
Abstract Slides Poster Similar
Adaptive Image Compression Using GAN Based Semantic-Perceptual Residual Compensation
Ruojing Wang, Zitang Sun, Sei-Ichiro Kamata, Weili Chen
Auto-TLDR; Adaptive Image Compression using GAN based Semantic-Perceptual Residual Compensation
Abstract Slides Poster Similar
PROPEL: Probabilistic Parametric Regression Loss for Convolutional Neural Networks
Muhammad Asad, Rilwan Basaru, S M Masudur Rahman Al Arif, Greg Slabaugh
Auto-TLDR; PRObabilistic Parametric rEgression Loss for Probabilistic Regression Using Convolutional Neural Networks
Real-Time End-To-End Lane ID Estimation Using Recurrent Networks
Ibrahim Halfaoui, Fahd Bouzaraa, Onay Urfalioglu

Auto-TLDR; Real-Time, Vision-Only Lane Identification Using Monocular Camera
Abstract Slides Poster Similar
Deeply-Fused Attentive Network for Stereo Matching
Zuliu Yang, Xindong Ai, Weida Yang, Yong Zhao, Qifei Dai, Fuchi Li

Auto-TLDR; DF-Net: Deep Learning-based Network for Stereo Matching
Abstract Slides Poster Similar
Deep Universal Blind Image Denoising
Auto-TLDR; Image Denoising with Deep Convolutional Neural Networks
Adaptive Sampling of Pareto Frontiers with Binary Constraints Using Regression and Classification
Auto-TLDR; Adaptive Optimization for Black-Box Multi-Objective Optimizing Problems with Binary Constraints
RNN Training along Locally Optimal Trajectories via Frank-Wolfe Algorithm
Yun Yue, Ming Li, Venkatesh Saligrama, Ziming Zhang
Auto-TLDR; Frank-Wolfe Algorithm for Efficient Training of RNNs
Abstract Slides Poster Similar
Hybrid Approach for 3D Head Reconstruction: Using Neural Networks and Visual Geometry
Oussema Bouafif, Bogdan Khomutenko, Mohammed Daoudi

Auto-TLDR; Recovering 3D Head Geometry from a Single Image using Deep Learning and Geometric Techniques
Abstract Slides Poster Similar
Local Facial Attribute Transfer through Inpainting
Ricard Durall, Franz-Josef Pfreundt, Janis Keuper
Auto-TLDR; Attribute Transfer Inpainting Generative Adversarial Network
Abstract Slides Poster Similar
Unsupervised Moving Object Detection through Background Models for PTZ Camera
Kimin Yun, Hyung-Il Kim, Kangmin Bae, Jongyoul Park
Auto-TLDR; Unsupervised Moving Object Detection in a PTZ Camera through Two Background Models
Abstract Slides Poster Similar
MBD-GAN: Model-Based Image Deblurring with a Generative Adversarial Network
Auto-TLDR; Model-Based Deblurring GAN for Inverse Imaging
Abstract Slides Poster Similar
LiNet: A Lightweight Network for Image Super Resolution
Armin Mehri, Parichehr Behjati Ardakani, Angel D. Sappa
Auto-TLDR; LiNet: A Compact Dense Network for Lightweight Super Resolution
Abstract Slides Poster Similar