Exact and Convergent Iterative Methods to Compute the Orthogonal Point-To-Ellipse Distance
Siyu Guo,
Pingping Hu,
Zhigang Ling,
He Wen,
Min Liu,
Lu Tang
Auto-TLDR; Convergent iterative algorithm for orthogonal distance based ellipse fitting
Similar papers
Camera Calibration Using Parallel Line Segments

Auto-TLDR; Closed-Form Calibration of Surveillance Cameras using Parallel 3D Line Segment Projections
Abstract Slides Poster Similar
Generalized Conics: Properties and Applications
Aysylu Gabdulkhakova, Walter Kropatsch
Auto-TLDR; A Generalized Conic Representation for Distance Fields
Abstract Slides Poster Similar
Uniform and Non-Uniform Sampling Methods for Sub-Linear Time K-Means Clustering
Auto-TLDR; Sub-linear Time Clustering with Constant Approximation Ratio for K-Means Problem
Abstract Slides Poster Similar
A Two-Step Approach to Lidar-Camera Calibration
Yingna Su, Yaqing Ding, Jian Yang, Hui Kong

Auto-TLDR; Closed-Form Calibration of Lidar-camera System for Ego-motion Estimation and Scene Understanding
Abstract Slides Poster Similar
A Plane-Based Approach for Indoor Point Clouds Registration
Ketty Favre, Muriel Pressigout, Luce Morin, Eric Marchand

Auto-TLDR; A plane-based registration approach for indoor environments based on LiDAR data
Abstract Slides Poster Similar
A Globally Optimal Method for the PnP Problem with MRP Rotation Parameterization
Manolis Lourakis, George Terzakis
Auto-TLDR; A Direct least squares, algebraic PnP solver with modified Rodrigues parameters
RNN Training along Locally Optimal Trajectories via Frank-Wolfe Algorithm
Yun Yue, Ming Li, Venkatesh Saligrama, Ziming Zhang
Auto-TLDR; Frank-Wolfe Algorithm for Efficient Training of RNNs
Abstract Slides Poster Similar
One Step Clustering Based on A-Contrario Framework for Detection of Alterations in Historical Violins
Alireza Rezaei, Sylvie Le Hégarat-Mascle, Emanuel Aldea, Piercarlo Dondi, Marco Malagodi

Auto-TLDR; A-Contrario Clustering for the Detection of Altered Violins using UVIFL Images
Abstract Slides Poster Similar
Minimal Solvers for Indoor UAV Positioning
Marcus Valtonen Örnhag, Patrik Persson, Mårten Wadenbäck, Kalle Åström, Anders Heyden

Auto-TLDR; Relative Pose Solvers for Visual Indoor UAV Navigation
Abstract Slides Poster Similar
Learning Sign-Constrained Support Vector Machines
Kenya Tajima, Kouhei Tsuchida, Esmeraldo Ronnie Rey Zara, Naoya Ohta, Tsuyoshi Kato
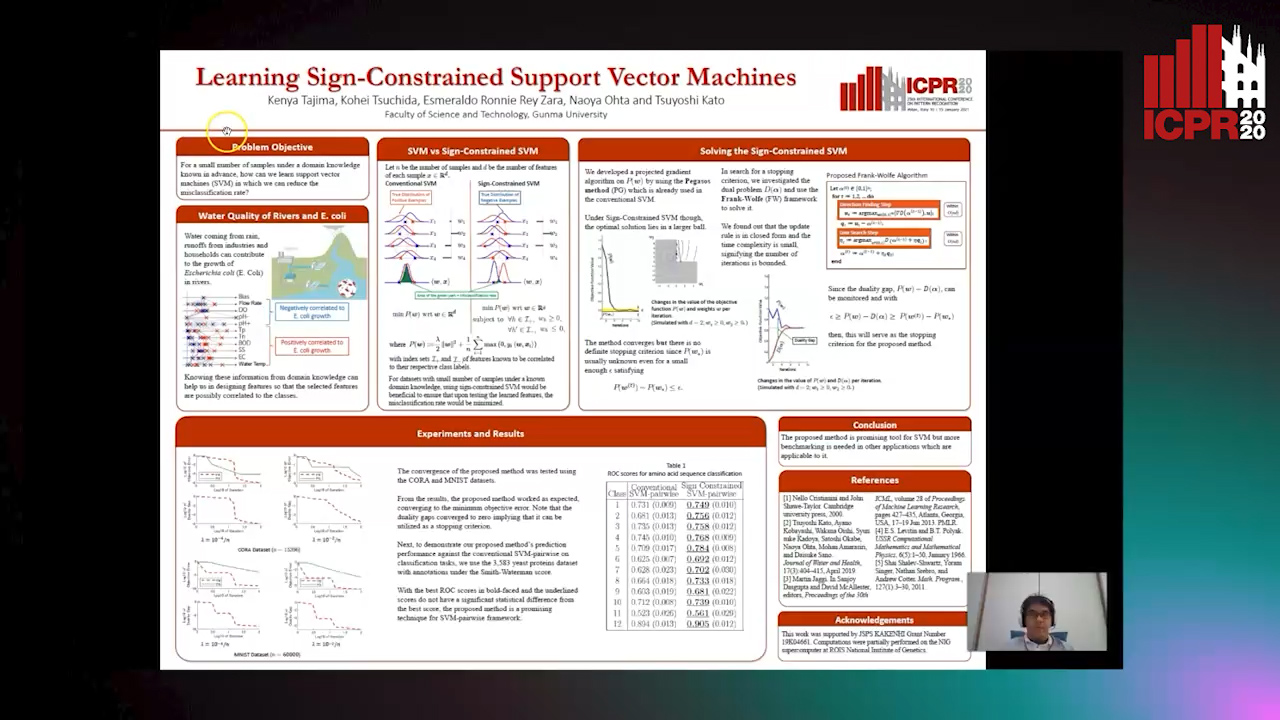
Auto-TLDR; Constrained Sign Constraints for Learning Linear Support Vector Machine
Adaptive Sampling of Pareto Frontiers with Binary Constraints Using Regression and Classification
Auto-TLDR; Adaptive Optimization for Black-Box Multi-Objective Optimizing Problems with Binary Constraints
Low Rank Representation on Product Grassmann Manifolds for Multi-viewSubspace Clustering
Jipeng Guo, Yanfeng Sun, Junbin Gao, Yongli Hu, Baocai Yin

Auto-TLDR; Low Rank Representation on Product Grassmann Manifold for Multi-View Data Clustering
Abstract Slides Poster Similar
Computing Stable Resultant-Based Minimal Solvers by Hiding a Variable
Snehal Bhayani, Zuzana Kukelova, Janne Heikkilä
Auto-TLDR; Sparse Permian-Based Method for Solving Minimal Systems of Polynomial Equations
A Randomized Algorithm for Sparse Recovery
Huiyuan Yu, Maggie Cheng, Yingdong Lu

Auto-TLDR; A Constrained Graph Optimization Algorithm for Sparse Signal Recovery
User-Independent Gaze Estimation by Extracting Pupil Parameter and Its Mapping to the Gaze Angle

Auto-TLDR; Gaze Point Estimation using Pupil Shape for Generalization
Abstract Slides Poster Similar
A Multilinear Sampling Algorithm to Estimate Shapley Values
Auto-TLDR; A sampling method for Shapley values for multilayer Perceptrons
Abstract Slides Poster Similar
Graph Approximations to Geodesics on Metric Graphs
Robin Vandaele, Yvan Saeys, Tijl De Bie
Auto-TLDR; Topological Pattern Recognition of Metric Graphs Using Proximity Graphs
Abstract Slides Poster Similar
Scalable Direction-Search-Based Approach to Subspace Clustering
Auto-TLDR; Fast Direction-Search-Based Subspace Clustering
Extraction and Analysis of 3D Kinematic Parameters of Table Tennis Ball from a Single Camera
Jordan Calandre, Renaud Péteri, Laurent Mascarilla, Benoit Tremblais
Auto-TLDR; 3D Ball Trajectories Analysis using a Single Camera for Sport Gesture Analysis
Abstract Slides Poster Similar
Sparse-Dense Subspace Clustering
Shuai Yang, Wenqi Zhu, Yuesheng Zhu
Auto-TLDR; Sparse-Dense Subspace Clustering with Piecewise Correlation Estimation
Abstract Slides Poster Similar
A Spectral Clustering on Grassmann Manifold Via Double Low Rank Constraint
Xinglin Piao, Yongli Hu, Junbin Gao, Yanfeng Sun, Xin Yang, Baocai Yin
Auto-TLDR; Double Low Rank Representation for High-Dimensional Data Clustering on Grassmann Manifold
A New Geodesic-Based Feature for Characterization of 3D Shapes: Application to Soft Tissue Organ Temporal Deformations
Karim Makki, Amine Bohi, Augustin Ogier, Marc-Emmanuel Bellemare
Auto-TLDR; Spatio-Temporal Feature Descriptors for 3D Shape Characterization from Point Clouds
Abstract Slides Poster Similar
Generalized Shortest Path-Based Superpixels for Accurate Segmentation of Spherical Images
Rémi Giraud, Rodrigo Borba Pinheiro, Yannick Berthoumieu
Auto-TLDR; SPS: Spherical Shortest Path-based Superpixels
Abstract Slides Poster Similar
Stabilized Calculation of Gaussian Smoothing and Its Differentials Using Attenuated Sliding Fourier Transform
Yukihiko Yamashita, Toru Wakahara
Auto-TLDR; An attenuated SFT for Gaussian smoothing
Abstract Slides Poster Similar
Subspace Clustering Via Joint Unsupervised Feature Selection
Wenhua Dong, Xiaojun Wu, Hui Li, Zhenhua Feng, Josef Kittler
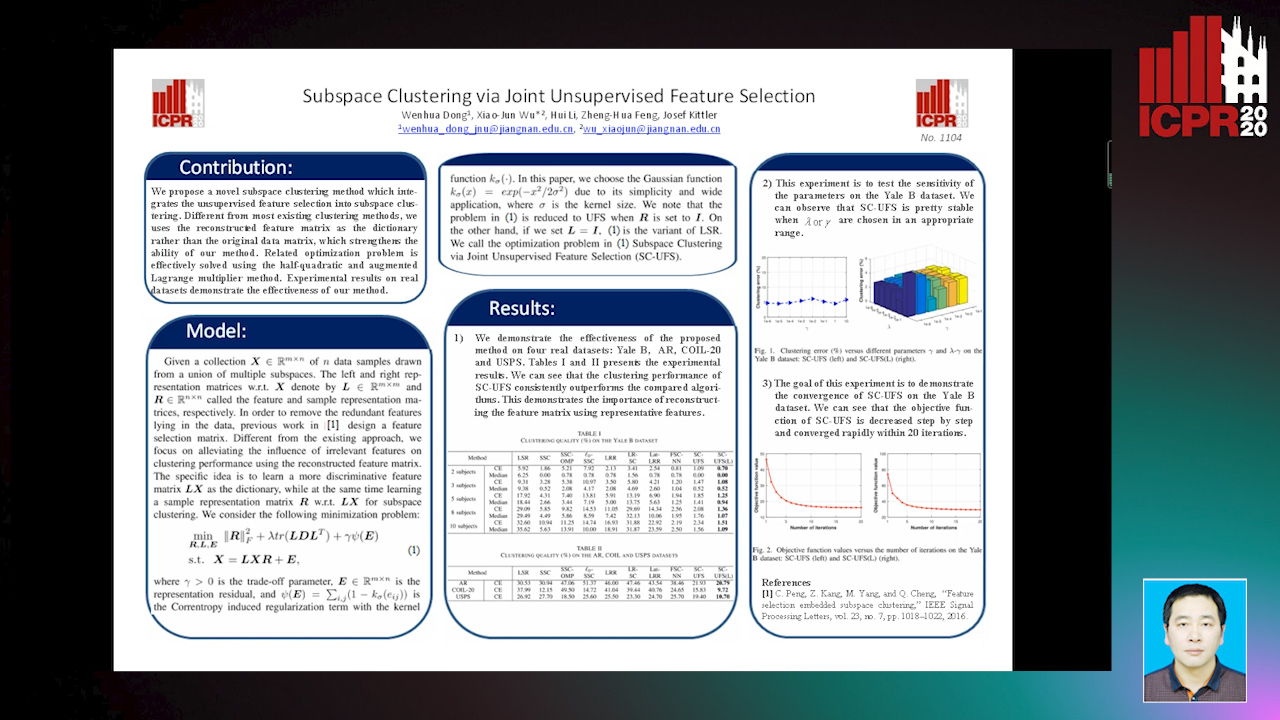
Auto-TLDR; Unsupervised Feature Selection for Subspace Clustering
Double Manifolds Regularized Non-Negative Matrix Factorization for Data Representation
Jipeng Guo, Shuai Yin, Yanfeng Sun, Yongli Hu

Auto-TLDR; Double Manifolds Regularized Non-negative Matrix Factorization for Clustering
Abstract Slides Poster Similar
Label Self-Adaption Hashing for Image Retrieval
Jianglin Lu, Zhihui Lai, Hailing Wang, Jie Zhou
Auto-TLDR; Label Self-Adaption Hashing for Large-Scale Image Retrieval
Abstract Slides Poster Similar
Multi-Camera Sports Players 3D Localization with Identification Reasoning
Yukun Yang, Ruiheng Zhang, Wanneng Wu, Yu Peng, Xu Min

Auto-TLDR; Probabilistic and Identified Occupancy Map for Sports Players 3D Localization
Abstract Slides Poster Similar
Hybrid Approach for 3D Head Reconstruction: Using Neural Networks and Visual Geometry
Oussema Bouafif, Bogdan Khomutenko, Mohammed Daoudi

Auto-TLDR; Recovering 3D Head Geometry from a Single Image using Deep Learning and Geometric Techniques
Abstract Slides Poster Similar
Generic Merging of Structure from Motion Maps with a Low Memory Footprint
Gabrielle Flood, David Gillsjö, Patrik Persson, Anders Heyden, Kalle Åström

Auto-TLDR; A Low-Memory Footprint Representation for Robust Map Merge
Abstract Slides Poster Similar
Effective Deployment of CNNs for 3DoF Pose Estimation and Grasping in Industrial Settings
Daniele De Gregorio, Riccardo Zanella, Gianluca Palli, Luigi Di Stefano

Auto-TLDR; Automated Deep Learning for Robotic Grasping Applications
Abstract Slides Poster Similar
A Hybrid Metric Based on Persistent Homology and Its Application to Signal Classification
Austin Lawson, Yu-Min Chung, William Cruse
Auto-TLDR; Topological Data Analysis with Persistence Curves
Unveiling Groups of Related Tasks in Multi-Task Learning
Jordan Frecon, Saverio Salzo, Massimiliano Pontil
Auto-TLDR; Continuous Bilevel Optimization for Multi-Task Learning
Abstract Slides Poster Similar
Fast Multi-Level Foreground Estimation
Thomas Germer, Tobias Uelwer, Stefan Conrad, Stefan Harmeling
Auto-TLDR; Fur foreground estimation given the alpha matte
Abstract Slides Poster Similar
Visual Saliency Oriented Vehicle Scale Estimation
Qixin Chen, Tie Liu, Jiali Ding, Zejian Yuan, Yuanyuan Shang

Auto-TLDR; Regularized Intensity Matching for Vehicle Scale Estimation with salient object detection
Abstract Slides Poster Similar
Rotational Adjoint Methods for Learning-Free 3D Human Pose Estimation from IMU Data
Caterina Emilia Agelide Buizza, Yiannis Demiris

Auto-TLDR; Learning-free 3D Human Pose Estimation from Inertial Measurement Unit Data
Stochastic Runge-Kutta Methods and Adaptive SGD-G2 Stochastic Gradient Descent
Auto-TLDR; Adaptive Stochastic Runge Kutta for the Minimization of the Loss Function
Abstract Slides Poster Similar
Generic Document Image Dewarping by Probabilistic Discretization of Vanishing Points
Gilles Simon, Salvatore Tabbone
Auto-TLDR; Robust Document Dewarping using vanishing points
Abstract Slides Poster Similar
T-SVD Based Non-Convex Tensor Completion and Robust Principal Component Analysis
Auto-TLDR; Non-Convex tensor rank surrogate function and non-convex sparsity measure for tensor recovery
Abstract Slides Poster Similar
3D Pots Configuration System by Optimizing Over Geometric Constraints
Jae Eun Kim, Muhammad Zeeshan Arshad, Seong Jong Yoo, Je Hyeong Hong, Jinwook Kim, Young Min Kim

Auto-TLDR; Optimizing 3D Configurations for Stable Pottery Restoration from irregular and noisy evidence
Abstract Slides Poster Similar
Calibration and Absolute Pose Estimation of Trinocular Linear Camera Array for Smart City Applications
Martin Ahrnbom, Mikael Nilsson, Håkan Ardö, Kalle Åström, Oksana Yastremska-Kravchenko, Aliaksei Laureshyn

Auto-TLDR; Trinocular Linear Camera Array Calibration for Traffic Surveillance Applications
Abstract Slides Poster Similar
Low-Cost Lipschitz-Independent Adaptive Importance Sampling of Stochastic Gradients
Huikang Liu, Xiaolu Wang, Jiajin Li, Man-Cho Anthony So
Auto-TLDR; Adaptive Importance Sampling for Stochastic Gradient Descent
Photometric Stereo with Twin-Fisheye Cameras
Jordan Caracotte, Fabio Morbidi, El Mustapha Mouaddib
Auto-TLDR; Photometric stereo problem for low-cost 360-degree cameras
Abstract Slides Poster Similar
Self-Supervised Detection and Pose Estimation of Logistical Objects in 3D Sensor Data
Nikolas Müller, Jonas Stenzel, Jian-Jia Chen

Auto-TLDR; A self-supervised and fully automated deep learning approach for object pose estimation using simulated 3D data
Abstract Slides Poster Similar
Combined Invariants to Gaussian Blur and Affine Transformation
Jitka Kostkova, Jan Flusser, Matteo Pedone

Auto-TLDR; A new theory of combined moment invariants to Gaussian blur and spatial affine transformation
Abstract Slides Poster Similar
Uncertainty Guided Recognition of Tiny Craters on the Moon
Thorsten Wilhelm, Christian Wöhler

Auto-TLDR; Accurately Detecting Tiny Craters in Remote Sensed Images Using Deep Neural Networks
Abstract Slides Poster Similar
Classification and Feature Selection Using a Primal-Dual Method and Projections on Structured Constraints
Michel Barlaud, Antonin Chambolle, Jean_Baptiste Caillau

Auto-TLDR; A Constrained Primal-dual Method for Structured Feature Selection on High Dimensional Data
Abstract Slides Poster Similar
Joint Learning Multiple Curvature Descriptor for 3D Palmprint Recognition
Lunke Fei, Bob Zhang, Jie Wen, Chunwei Tian, Peng Liu, Shuping Zhao
Auto-TLDR; Joint Feature Learning for 3D palmprint recognition using curvature data vectors
Abstract Slides Poster Similar