Generalized Conics: Properties and Applications
Aysylu Gabdulkhakova,
Walter Kropatsch
Auto-TLDR; A Generalized Conic Representation for Distance Fields
Similar papers
Exact and Convergent Iterative Methods to Compute the Orthogonal Point-To-Ellipse Distance
Siyu Guo, Pingping Hu, Zhigang Ling, He Wen, Min Liu, Lu Tang
Auto-TLDR; Convergent iterative algorithm for orthogonal distance based ellipse fitting
Abstract Slides Poster Similar
A Hybrid Metric Based on Persistent Homology and Its Application to Signal Classification
Austin Lawson, Yu-Min Chung, William Cruse
Auto-TLDR; Topological Data Analysis with Persistence Curves
One Step Clustering Based on A-Contrario Framework for Detection of Alterations in Historical Violins
Alireza Rezaei, Sylvie Le Hégarat-Mascle, Emanuel Aldea, Piercarlo Dondi, Marco Malagodi

Auto-TLDR; A-Contrario Clustering for the Detection of Altered Violins using UVIFL Images
Abstract Slides Poster Similar
Camera Calibration Using Parallel Line Segments

Auto-TLDR; Closed-Form Calibration of Surveillance Cameras using Parallel 3D Line Segment Projections
Abstract Slides Poster Similar
A Globally Optimal Method for the PnP Problem with MRP Rotation Parameterization
Manolis Lourakis, George Terzakis
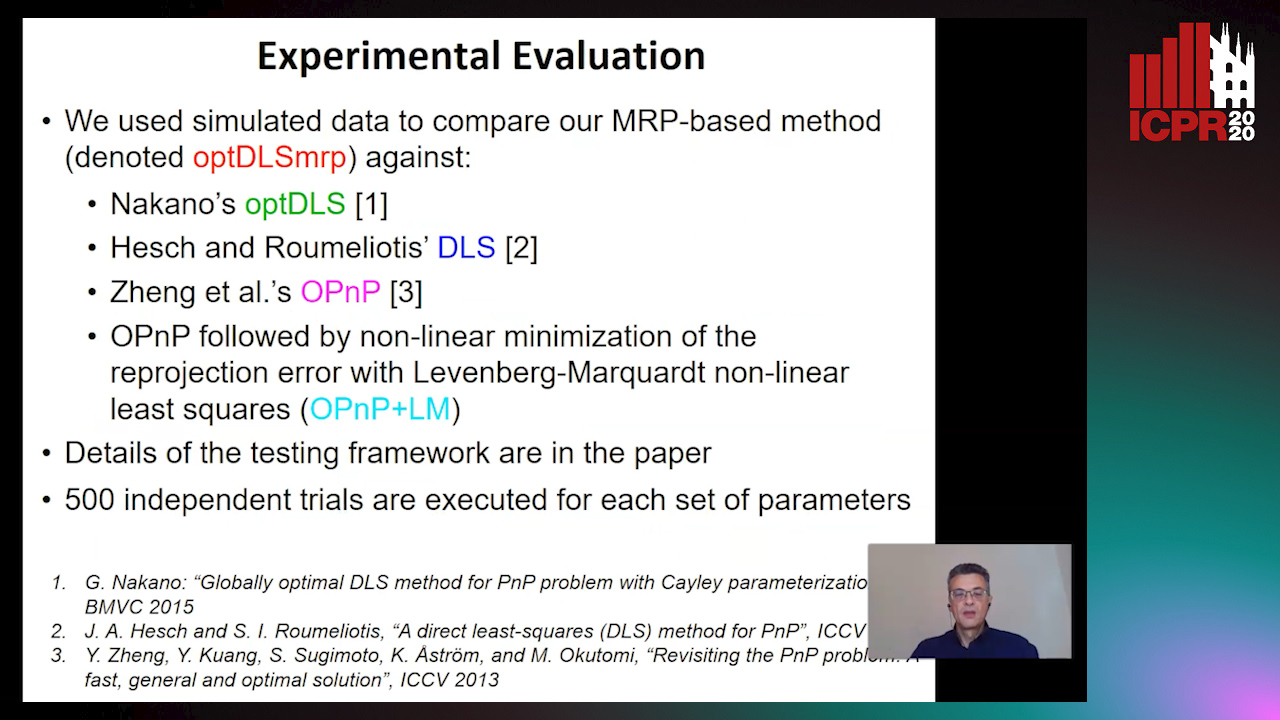
Auto-TLDR; A Direct least squares, algebraic PnP solver with modified Rodrigues parameters
Graph Approximations to Geodesics on Metric Graphs
Robin Vandaele, Yvan Saeys, Tijl De Bie
Auto-TLDR; Topological Pattern Recognition of Metric Graphs Using Proximity Graphs
Abstract Slides Poster Similar
Force Banner for the Recognition of Spatial Relations
Robin Deléarde, Camille Kurtz, Laurent Wendling, Philippe Dejean
Auto-TLDR; Spatial Relation Recognition using Force Banners
Generic Document Image Dewarping by Probabilistic Discretization of Vanishing Points
Gilles Simon, Salvatore Tabbone
Auto-TLDR; Robust Document Dewarping using vanishing points
Abstract Slides Poster Similar
Computing Stable Resultant-Based Minimal Solvers by Hiding a Variable
Snehal Bhayani, Zuzana Kukelova, Janne Heikkilä
Auto-TLDR; Sparse Permian-Based Method for Solving Minimal Systems of Polynomial Equations
Graph Signal Active Contours

Auto-TLDR; Adaptation of Active Contour Without Edges for Graph Signal Processing
Generalized Shortest Path-Based Superpixels for Accurate Segmentation of Spherical Images
Rémi Giraud, Rodrigo Borba Pinheiro, Yannick Berthoumieu
Auto-TLDR; SPS: Spherical Shortest Path-based Superpixels
Abstract Slides Poster Similar
Fast Blending of Planar Shapes Based on Invariant Invertible and Stable Descriptors
Emna Ghorbel, Faouzi Ghorbel, Ines Sakly, Slim Mhiri
Auto-TLDR; Fined-Fourier-based Invariant Descriptor for Planar Shape Blending
Abstract Slides Poster Similar
3D Pots Configuration System by Optimizing Over Geometric Constraints
Jae Eun Kim, Muhammad Zeeshan Arshad, Seong Jong Yoo, Je Hyeong Hong, Jinwook Kim, Young Min Kim

Auto-TLDR; Optimizing 3D Configurations for Stable Pottery Restoration from irregular and noisy evidence
Abstract Slides Poster Similar
Learning Graph Matching Substitution Weights Based on a Linear Regression
Shaima Algabli, Francesc Serratosa
Auto-TLDR; Learning the weights on local attributes of attributed graphs
Abstract Slides Poster Similar
Boundaries of Single-Class Regions in the Input Space of Piece-Wise Linear Neural Networks
Auto-TLDR; Piece-wise Linear Neural Networks with Linear Constraints
Transferable Model for Shape Optimization subject to Physical Constraints
Lukas Harsch, Johannes Burgbacher, Stefan Riedelbauch
Auto-TLDR; U-Net with Spatial Transformer Network for Flow Simulations
Abstract Slides Poster Similar
Uniform and Non-Uniform Sampling Methods for Sub-Linear Time K-Means Clustering
Auto-TLDR; Sub-linear Time Clustering with Constant Approximation Ratio for K-Means Problem
Abstract Slides Poster Similar
2D Discrete Mirror Transform for Image Non-Linear Approximation
Alessandro Gnutti, Fabrizio Guerrini, Riccardo Leonardi

Auto-TLDR; Discrete Mirror Transform (DMT)
Abstract Slides Poster Similar
Unconstrained Vision Guided UAV Based Safe Helicopter Landing
Arindam Sikdar, Abhimanyu Sahu, Debajit Sen, Rohit Mahajan, Ananda Chowdhury

Auto-TLDR; Autonomous Helicopter Landing in Hazardous Environments from Unmanned Aerial Images Using Constrained Graph Clustering
Abstract Slides Poster Similar
Calibration and Absolute Pose Estimation of Trinocular Linear Camera Array for Smart City Applications
Martin Ahrnbom, Mikael Nilsson, Håkan Ardö, Kalle Åström, Oksana Yastremska-Kravchenko, Aliaksei Laureshyn

Auto-TLDR; Trinocular Linear Camera Array Calibration for Traffic Surveillance Applications
Abstract Slides Poster Similar
A Hierarchical Framework for Leaf Instance Segmentation: Application to Plant Phenotyping
Swati Bhugra, Kanish Garg, Santanu Chaudhury, Brejesh Lall
Auto-TLDR; Under-segmentation of plant image using a graph based formulation to extract leaf shape knowledge for the task of leaf instance segmentation
Abstract Slides Poster Similar
Minimal Solvers for Indoor UAV Positioning
Marcus Valtonen Örnhag, Patrik Persson, Mårten Wadenbäck, Kalle Åström, Anders Heyden

Auto-TLDR; Relative Pose Solvers for Visual Indoor UAV Navigation
Abstract Slides Poster Similar
Classification of Spatially Enriched Pixel Time Series with Convolutional Neural Networks
Mohamed Chelali, Camille Kurtz, Anne Puissant, Nicole Vincent
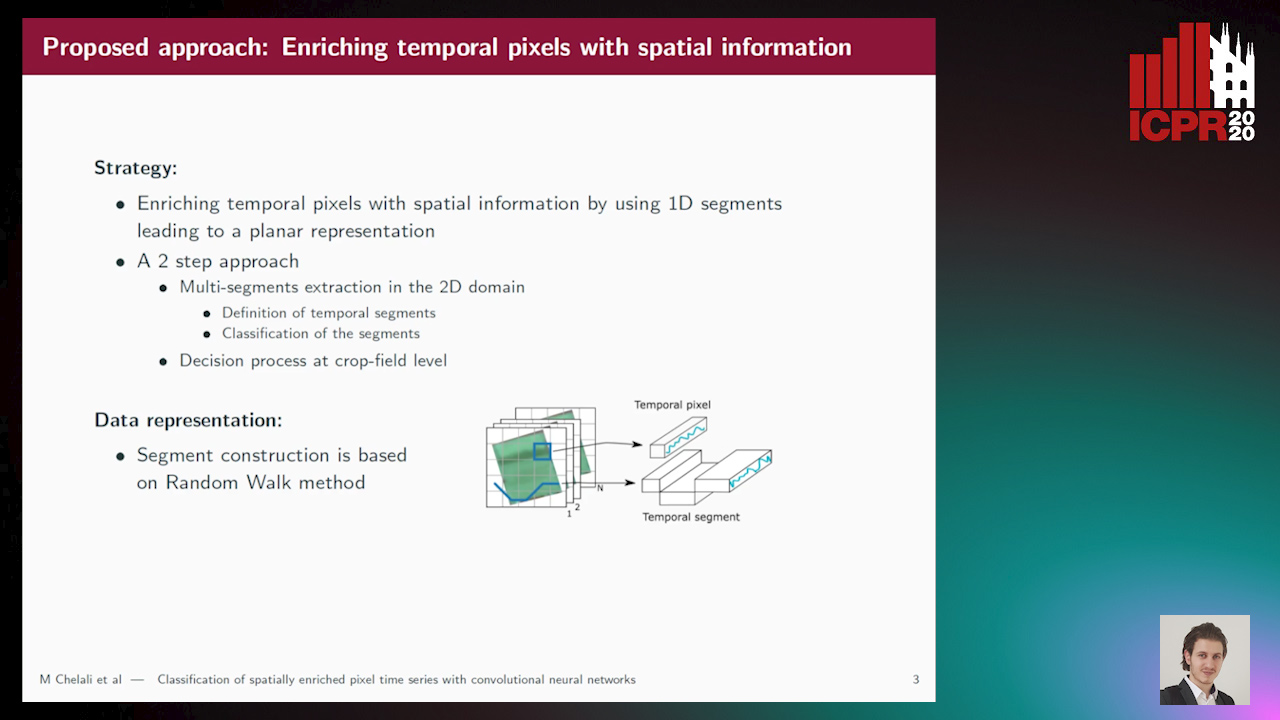
Auto-TLDR; Spatio-Temporal Features Extraction from Satellite Image Time Series Using Random Walk
Abstract Slides Poster Similar
An Invariance-Guided Stability Criterion for Time Series Clustering Validation
Florent Forest, Alex Mourer, Mustapha Lebbah, Hanane Azzag, Jérôme Lacaille
Auto-TLDR; An invariance-guided method for clustering model selection in time series data
Abstract Slides Poster Similar
Supervised Classification Using Graph-Based Space Partitioning for Multiclass Problems
Nicola Yanev, Ventzeslav Valev, Adam Krzyzak, Karima Ben Suliman
Auto-TLDR; Box Classifier for Multiclass Classification
Abstract Slides Poster Similar
Interactive Style Space of Deep Features and Style Innovation

Auto-TLDR; Interactive Style Space of Convolutional Neural Network Features
Abstract Slides Poster Similar
Generic Merging of Structure from Motion Maps with a Low Memory Footprint
Gabrielle Flood, David Gillsjö, Patrik Persson, Anders Heyden, Kalle Åström

Auto-TLDR; A Low-Memory Footprint Representation for Robust Map Merge
Abstract Slides Poster Similar
Combined Invariants to Gaussian Blur and Affine Transformation
Jitka Kostkova, Jan Flusser, Matteo Pedone

Auto-TLDR; A new theory of combined moment invariants to Gaussian blur and spatial affine transformation
Abstract Slides Poster Similar
Inferring Functional Properties from Fluid Dynamics Features
Andrea Schillaci, Maurizio Quadrio, Carlotta Pipolo, Marcello Restelli, Giacomo Boracchi
Auto-TLDR; Exploiting Convective Properties of Computational Fluid Dynamics for Medical Diagnosis
Abstract Slides Poster Similar
PIF: Anomaly detection via preference embedding
Filippo Leveni, Luca Magri, Giacomo Boracchi, Cesare Alippi
Auto-TLDR; PIF: Anomaly Detection with Preference Embedding for Structured Patterns
Abstract Slides Poster Similar
Learning Embeddings for Image Clustering: An Empirical Study of Triplet Loss Approaches
Kalun Ho, Janis Keuper, Franz-Josef Pfreundt, Margret Keuper
Auto-TLDR; Clustering Objectives for K-means and Correlation Clustering Using Triplet Loss
Abstract Slides Poster Similar
A New Geodesic-Based Feature for Characterization of 3D Shapes: Application to Soft Tissue Organ Temporal Deformations
Karim Makki, Amine Bohi, Augustin Ogier, Marc-Emmanuel Bellemare
Auto-TLDR; Spatio-Temporal Feature Descriptors for 3D Shape Characterization from Point Clouds
Abstract Slides Poster Similar
Fractional Adaptation of Activation Functions in Neural Networks
Julio Zamora Esquivel, Jesus Adan Cruz Vargas, Paulo Lopez-Meyer, Hector Alfonso Cordourier Maruri, Jose Rodrigo Camacho Perez, Omesh Tickoo
Auto-TLDR; Automatic Selection of Activation Functions in Neural Networks using Fractional Calculus
Abstract Slides Poster Similar
Holistic Grid Fusion Based Stop Line Estimation
Runsheng Xu, Faezeh Tafazzoli, Li Zhang, Timo Rehfeld, Gunther Krehl, Arunava Seal

Auto-TLDR; Fused Multi-Sensory Data for Stop Lines Detection in Intersection Scenarios
On Morphological Hierarchies for Image Sequences
Caglayan Tuna, Alain Giros, François Merciol, Sébastien Lefèvre
Auto-TLDR; Comparison of Hierarchies for Image Sequences
Abstract Slides Poster Similar
Weakly Supervised Geodesic Segmentation of Egyptian Mummy CT Scans
Avik Hati, Matteo Bustreo, Diego Sona, Vittorio Murino, Alessio Del Bue

Auto-TLDR; A Weakly Supervised and Efficient Interactive Segmentation of Ancient Egyptian Mummies CT Scans Using Geodesic Distance Measure and GrabCut
Abstract Slides Poster Similar
Trainable Spectrally Initializable Matrix Transformations in Convolutional Neural Networks
Michele Alberti, Angela Botros, Schuetz Narayan, Rolf Ingold, Marcus Liwicki, Mathias Seuret
Auto-TLDR; Trainable and Spectrally Initializable Matrix Transformations for Neural Networks
Abstract Slides Poster Similar
Exploring the Ability of CNNs to Generalise to Previously Unseen Scales Over Wide Scale Ranges
Auto-TLDR; A theoretical analysis of invariance and covariance properties of scale channel networks
Abstract Slides Poster Similar
Dimensionality Reduction for Data Visualization and Linear Classification, and the Trade-Off between Robustness and Classification Accuracy
Martin Becker, Jens Lippel, Thomas Zielke
Auto-TLDR; Robustness Assessment of Deep Autoencoder for Data Visualization using Scatter Plots
Abstract Slides Poster Similar
Total Estimation from RGB Video: On-Line Camera Self-Calibration, Non-Rigid Shape and Motion

Auto-TLDR; Joint Auto-Calibration, Pose and 3D Reconstruction of a Non-rigid Object from an uncalibrated RGB Image Sequence
Abstract Slides Poster Similar
Locality-Promoting Representation Learning
Auto-TLDR; Locality-promoting Regularization for Neural Networks
Abstract Slides Poster Similar
Directional Graph Networks with Hard Weight Assignments
Miguel Dominguez, Raymond Ptucha
Auto-TLDR; Hard Directional Graph Networks for Point Cloud Analysis
Abstract Slides Poster Similar
Cost Volume Refinement for Depth Prediction
João L. Cardoso, Nuno Goncalves, Michael Wimmer

Auto-TLDR; Refining the Cost Volume for Depth Prediction from Light Field Cameras
Abstract Slides Poster Similar
P2D: A Self-Supervised Method for Depth Estimation from Polarimetry
Marc Blanchon, Desire Sidibe, Olivier Morel, Ralph Seulin, Daniel Braun, Fabrice Meriaudeau

Auto-TLDR; Polarimetric Regularization for Monocular Depth Estimation
Abstract Slides Poster Similar
Quantization in Relative Gradient Angle Domain for Building Polygon Estimation
Yuhao Chen, Yifan Wu, Linlin Xu, Alexander Wong
Auto-TLDR; Relative Gradient Angle Transform for Building Footprint Extraction from Remote Sensing Data
Abstract Slides Poster Similar
Adaptive Sampling of Pareto Frontiers with Binary Constraints Using Regression and Classification
Auto-TLDR; Adaptive Optimization for Black-Box Multi-Objective Optimizing Problems with Binary Constraints
Cluster-Size Constrained Network Partitioning
Maksim Mironov, Konstantin Avrachenkov
Auto-TLDR; Unsupervised Graph Clustering with Stochastic Block Model
Abstract Slides Poster Similar
Radar Image Reconstruction from Raw ADC Data Using Parametric Variational Autoencoder with Domain Adaptation
Michael Stephan, Thomas Stadelmayer, Avik Santra, Georg Fischer, Robert Weigel, Fabian Lurz
Auto-TLDR; Parametric Variational Autoencoder-based Human Target Detection and Localization for Frequency Modulated Continuous Wave Radar
Abstract Slides Poster Similar